Loading ...
Loading ...
Loading ...
Driver assistance systems
Driving situations
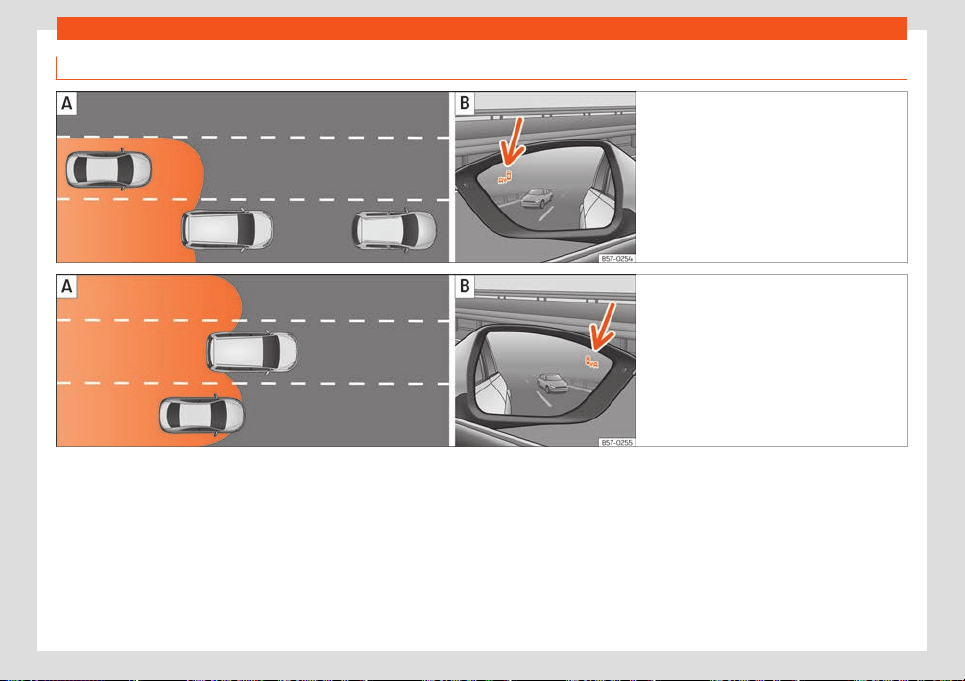
Fig. 276 Schematic representation: Passing
situation with traffic behind the vehicl
e. Indi-
cation from the blind spot detector in the left-
hand external mirror.
Fig. 277 Schematic representation: Situa-
tion of passing and then moving into the right-
hand l
ane. Indication from the blind spot de-
tector in the right-hand external mirror.
In the following situations, an indication will
be displ
ayed in the e
xt
ernal mirr
or
›
››
Fig. 276
(arrow) or
›››
Fig. 277 (arrow):
●
When being overtaken by another vehicle
›››
Fig. 276 .
●
When passing another vehicle
›››
Fig. 277
with a speed differential of approx. 10 km/h
(6 mph). If the vehicle is passing at a consid-
erably higher speed, no indication will be dis-
played.
The faster the vehicle approaches, the soon-
er an indication will be displayed in the exter-
nal mirror, because the blind spot detector
takes into account the speed differential with
other vehicles. Thus even though the distance
from the other vehicle is identical, the indica-
tion will appear sooner in some cases and
later in others.
Physical limitations inherent to the system
In some situations the blind spot detector
may not interpret the traffic situation correct-
ly. E.g. in the following situations:
●
on tight bends;
●
in the case of lanes with different widths;
●
at the top of slopes;
●
in adverse weather conditions;
»
293
Loading ...
Loading ...
Loading ...