
Loading ...
Loading ...
Loading ...
©
2019 DJI All Rights Reserved.
47
ROBOMASTER S1
User Manual
0.5ms
1.5ms
2.5ms
-90
º
-45
º
-0
º
45
º
90
º
1ms
2ms
Pulse Width Servo Angle
Setting the PWM Ports
PWM (pulse width modulation) controls the duration of a high level of output during a certain period,
and is broadly used to control LEDs, navigation gears, and more. The S1 PWM port has a default
duty cycle of 7.5% and a fundamental frequency of 50 Hz.
For LEDs, the PWM output rate ranges from 0% to 100%, with 0% corresponding to an LED’s lowest
brightness and 100% to its highest brightness. For navigation gears, the PWM output rate ranges
from 2.5% to 12.5%.
You can set the navigation gear PWM output percentage based on the rotation angles you wish to
control.
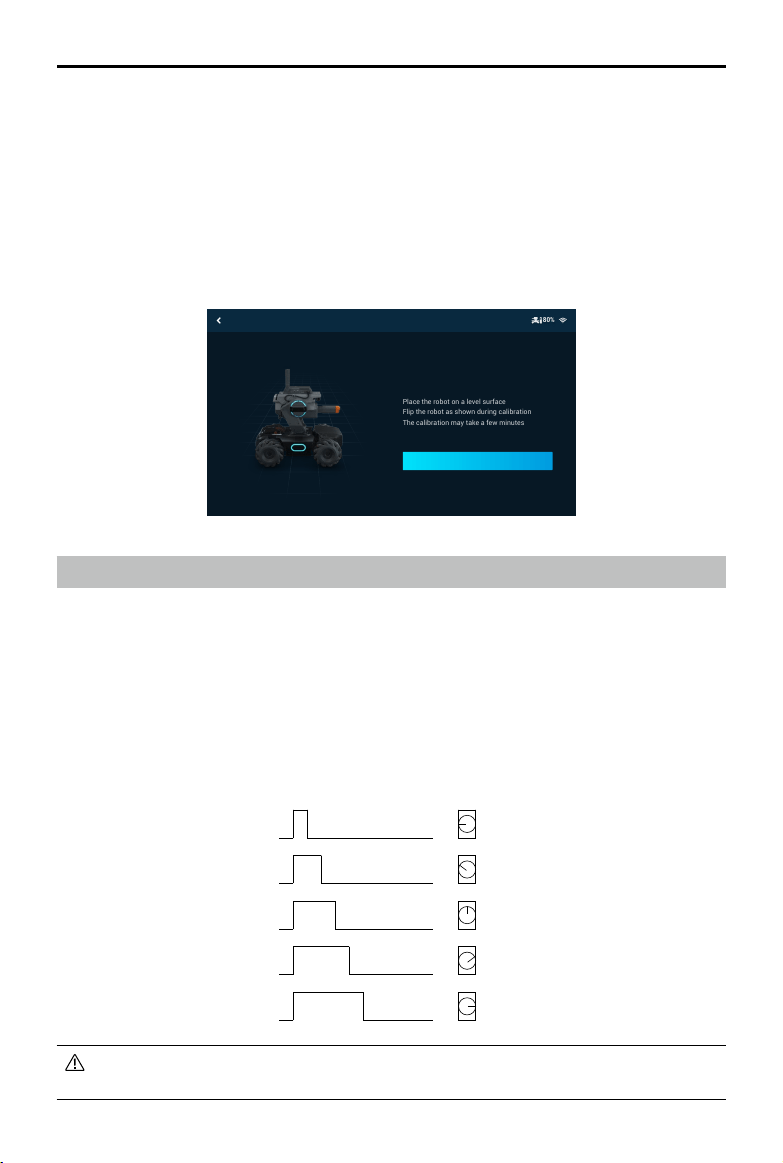
Place robot on a level surface
Calibrate
Place the robot on a level surface
Flip the robot as shown during calibration
The calibration may take a few minutes
80%
Robot Calibration
c. The pitch cannot rotate horizontally when the yaw is controlled separately.
d. The gimbal drifts when there is no operation or when the operation is stopped.
e. The S1 moves involuntarily while rotating.
f. The chassis is uncontrollable and the gimbal goes limp when warning prompts appear in the app.
g. The motion controller has been installed or reinstalled.
The specic calibration steps are as below:
1. Open the RoboMaster app, tap on Settings, then System, and select Calibration.
2. Follow the steps in the app to calibrate.
Each time the custom program or Python program nishes running, the PWM port output
signal will be set to its default setting, which is 50 Hz and the duty cycle is 7.5%.
Loading ...
Loading ...
Loading ...