Loading ...
Loading ...
Loading ...
21
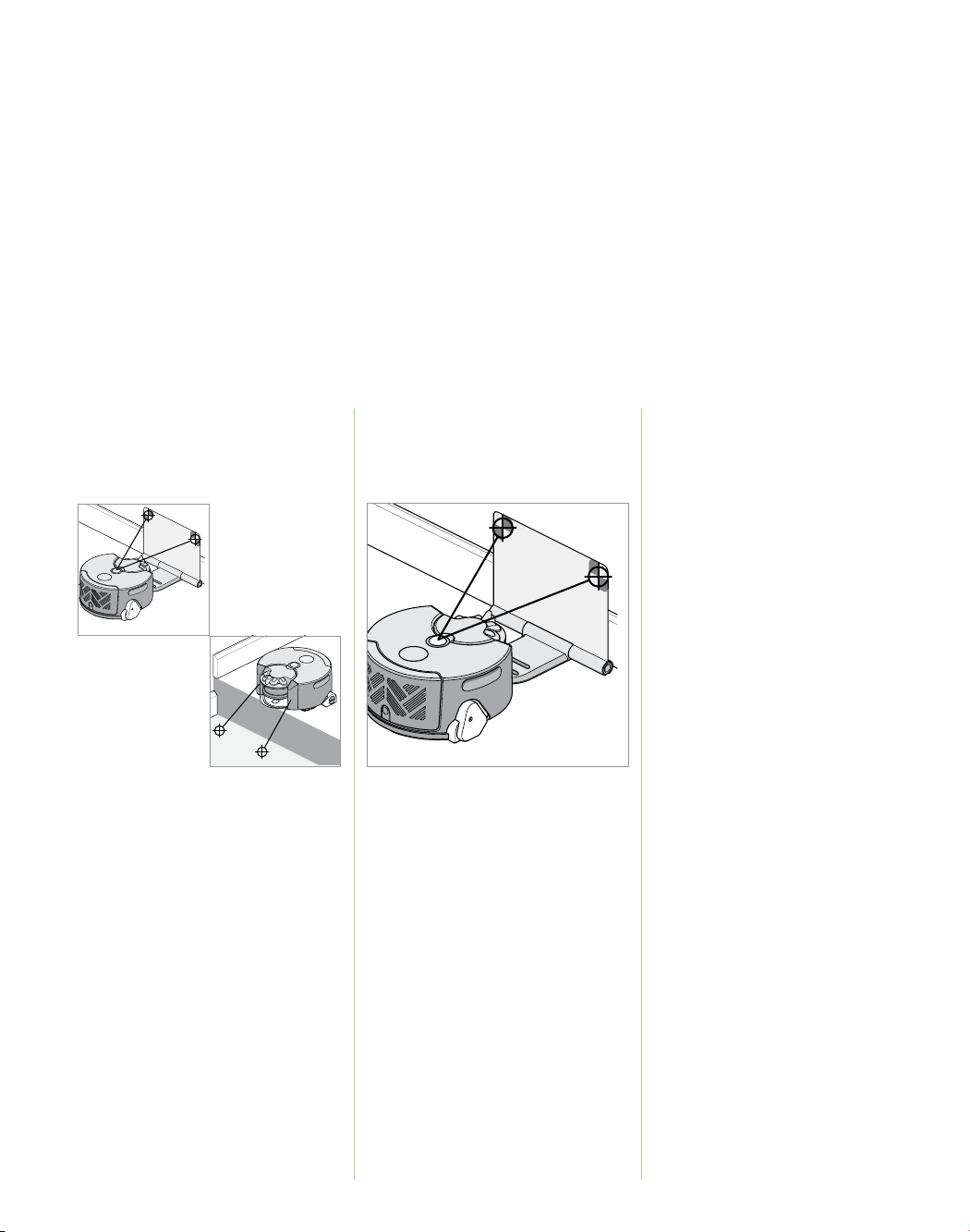
Your robot uses infra-red sensors
to identify obstacles, drops and the
boundaries of the cleaning space.
It then records these on its map.
When started from the dock your robot
will return to recharge mid-clean before
automatically resuming and completing
the clean.
If you do not want the robot to access an
area, provide a physical barrier, such as
closing a door.
Remove all clutter within 4in of drops as
this may interfere with the drop sensors.
The robot will occasionally detect some
obstacles by nudging them: please
put away any fragile items from the
floor space.
Your robot identifies the dock location
using the 360° camera: please make
sure that the dock is well lit and is
placed in an open, uncluttered area.
Your robot aligns its map to its start
orientation on the dock: place the dock
on a firm, level surface, flat against
a wall.
If your robot has trouble getting back to
the dock, try moving the dock’s location
before the next clean.
Your robot is powered using a lithium-
ion battery pack.
Charge time: 2hrs 45mins
Run time: 45mins
Your robot’s charge and run times are
approximate, as they depend on many
factors including charge remaining in
the battery, operating temperature and
the age of the battery.
Run time will also be influenced by the
layout of your home and type of floor
surface being cleaned.
To optimize the time it spends cleaning,
your robot's charge time will be less
when recharging at its dock mid-clean.
You do not have to wait for the robot’s
battery to be fully charged before
starting a clean, however if you
request a clean when the robot’s battery
is too low it will display a ‘Return to the
dock’ light.
Loading ...
Loading ...
Loading ...