Loading ...
Loading ...
Loading ...
20
Understanding and optimizing
your robot.
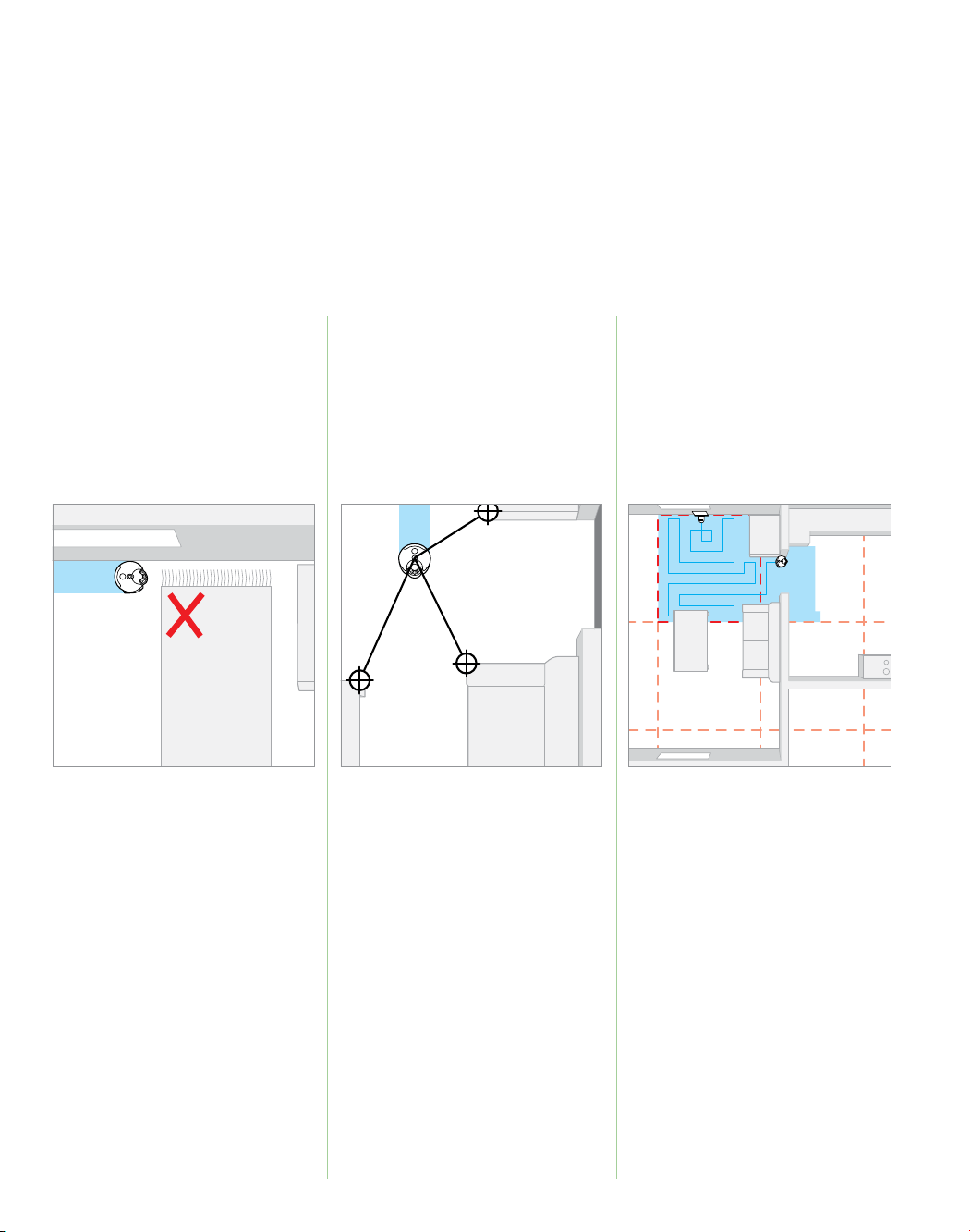
Suction Navigation Cleaning behavior
Your robot uses a Dyson digital motor
and full width brushbar to deliver
powerful cleaning.
Your robot uses a 360° vision system
to take a full panoramic image of
the room.
Your robot maps out your home into a
grid of squares, and cleans it using a
systematic cleaning pattern.
Put away thin, lightweight or loose
items that may be sucked up and
impair movement.
Should a blockage occur, the robot
will attempt to clear the blockage by
reducing suction for a short period.
If the robot becomes stuck on an
obstacle: clear the obstacle, replace
the robot as close as possible to where
you picked it up (ideally somewhere the
robot has already cleaned) and press
the pause button to continue cleaning.
The robot navigates by identifying
features in its field of view and tracking
these as it moves.
To improve the robot’s ability to
navigate, please provide adequate and
consistent illumination throughout the
duration of the clean.
In low light the robot will supplement
ambient illumination with infra-
red headlights.
To maintain navigation performance
clean the camera and headlights
regularly. See the ‘Cleaning Optics’
section in this manual.
For safety reasons the drop sensors are
very sensitive. Your robot may mistake
dark surfaces as drops and consequently
will not clean over them.
The grid does not always line up with
the edges of the room, the robot
may clean into another room before
returning to clean areas it has missed.
If your robot had trouble navigating
into an area, or if it is taking a long
time to clean, next time try moving the
dock. This will realign the boundaries
of the grid to your home and may
improve performance.
To visualize the robot’s cleaning
behavior and see maps of completed
cleans, connect your robot using the
Dyson Link app.
Loading ...
Loading ...
Loading ...