Loading ...
Loading ...
Loading ...
9796
Español Español
Indicaciones LED
Los indicadores LED le permiten ver el estado del RoboVac.
y
(Luces de estado de
alimentación)
Estado
Azul fijo
• En espera / Limpieza (cuando no se encuentre en la base
de carga)
• Carga completa
Morado fijo • Batería baja, volviendo a la base de carga
Parpadeo azul
• Cargando (nivel de carga ≥ 20 %)
• Cargando sistema
Parpadeo morado • Cargando (nivel de carga < 20 %)
Parpadea en azul 3 veces • Indicación de estado (junto con mensaje de voz)
Parpadeo rojo
• Indicación de error (junto con mensaje de voz)
Consulte la sección “Solución de problemas > Alerta de
voz” de este manual para encontrar soluciones.
Cuando el RoboVac está inactivo y no se encuentra en la base de carga durante
10 minutos, cambia automáticamente al modo de suspensión y la luz se atenúa
para conservar la energía.
(Luz de estado de Wi-Fi)
Estado
Azul intermitente lento
Esperando conexión (El RoboVac no puede conectarse a una
red Wi-Fi en modo de suspensión)
Azul intermitente rápido Conectando con el router inalámbrico
Azul fijo Conectado al router inalámbrico
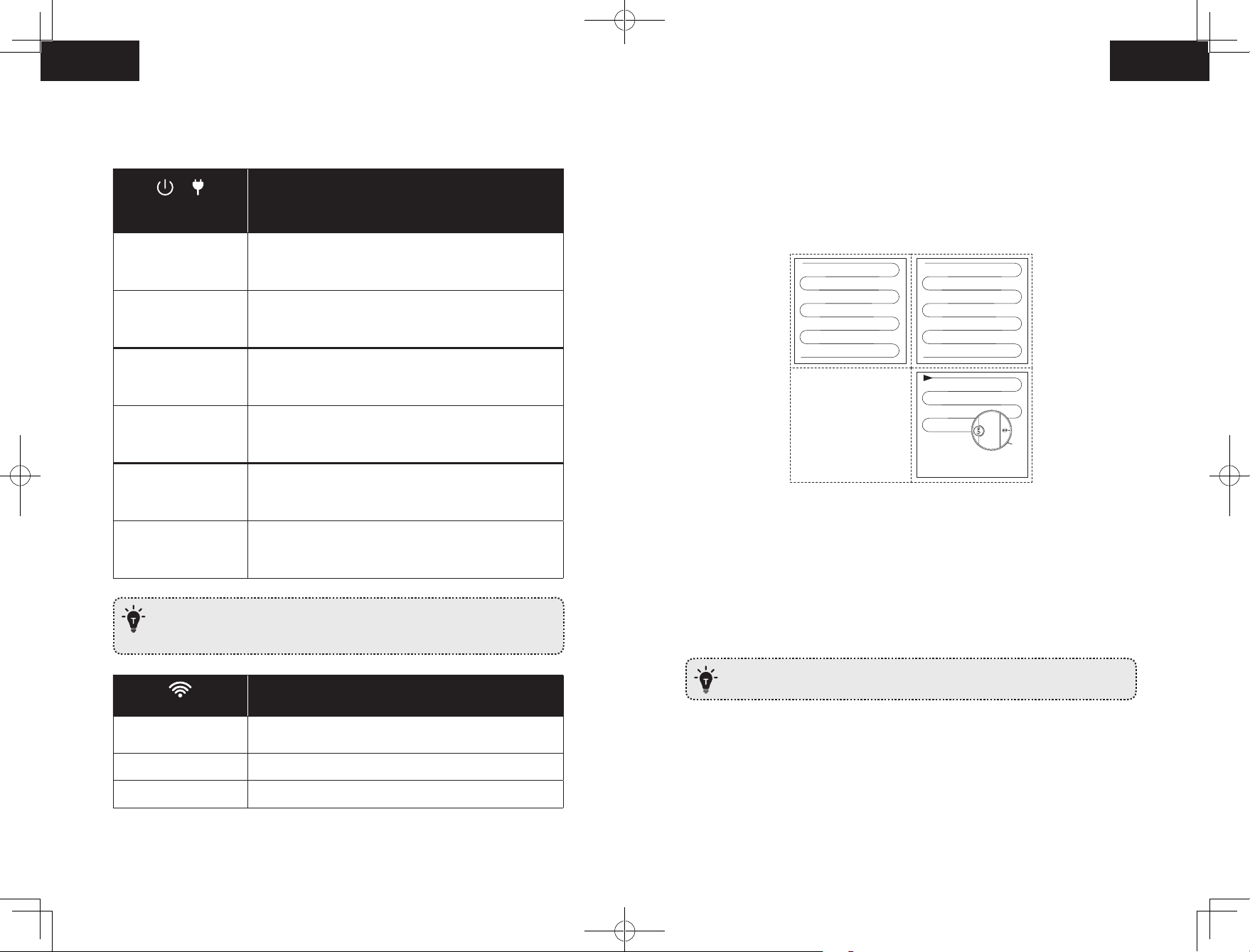
Navegación con mapa y administración
Navegación
Cuando se inicia la limpieza automática, el RoboVac se desplaza desde la base de carga,
realiza un escaneado automático para generar mapas, determina de forma inteligente
su ruta de limpieza y divide el espacio en zonas. Las rutas de limpieza se planifican a lo
largo de las paredes, siguiendo un método de limpieza en forma de arco para completar la
limpieza de cada zona de forma independiente.
Trazado de mapas y planos de planta en tiempo real
El trazado de mapas en tiempo real le ayuda a conocer la ruta de limpieza y el entorno
fácilmente. Después de la limpieza se generará un plano de planta. El mapa se actualizará
en tiempo real durante cada limpieza para garantizar una navegación normal.
Para crear un plano de planta completo:
1. abra las puertas para que el RoboVac trace el mapa de cada habitación;
2. retire cualquier objeto que pueda estar en la trayectoria del RoboVac o que pueda hacer
que este se quede atascado.
No retire la base de carga después de crear el plano de planta.
Reubicación y retrazado de mapas
Si se ajusta la posición del RoboVac / base de carga o los alrededores cambian de forma
significativa, el RoboVac intentará reubicarse y puede volver a trazar el mapa para que
coincida con los alrededores.
• El RoboVac reanudará la limpieza si la reubicación se realiza correctamente.
• Si la reubicación falla, el RoboVac volverá a trazar el mapa para garantizar la navegación
normal con una nueva limpieza.
Loading ...
Loading ...
Loading ...