Loading ...
Loading ...
Loading ...
English
- 164 -
The built-in sensor can even calculate
changes of altitude, and correct the
discrepancies in the distance traveled
caused by driving along winding roads or
up slopes.
If you use this navigation system with
connecting the speed pulse, the system
will become more accurate than no
connection of speed pulse. So you connect
the speed pulse without fail to get the
accuracy of positioning.
• The position of the speed detection
circuit vary depending on the vehicle
model. For details, consult your
authorized Pioneer dealer or an
installation professional.
• Some types of vehicles may not output a
speed signal while driving at just a few
kilometers per hour. In such a case, the
current location of your vehicle may not
be displayed correctly while in traffic
congestion or in a parking lot.
For maximum accuracy, your navigation
system continually compares GPS data
with your estimated position as calculated
from the data of built-in sensor. However, if
only the data from the built-in sensor is
available for a long period, positioning
errors are gradually compounded until the
estimated position becomes unreliable. For
this reason, whenever GPS signals are
available, they are matched with the data
of the built-in sensor and used to correct it
for improved accuracy.
• If you use chains on your wheels for
winter driving or put on the spare wheel,
errors may suddenly increase because of
difference in wheel diameter. Initialize
the sensor status and it may recover the
accuracy to normal condition (page 136).
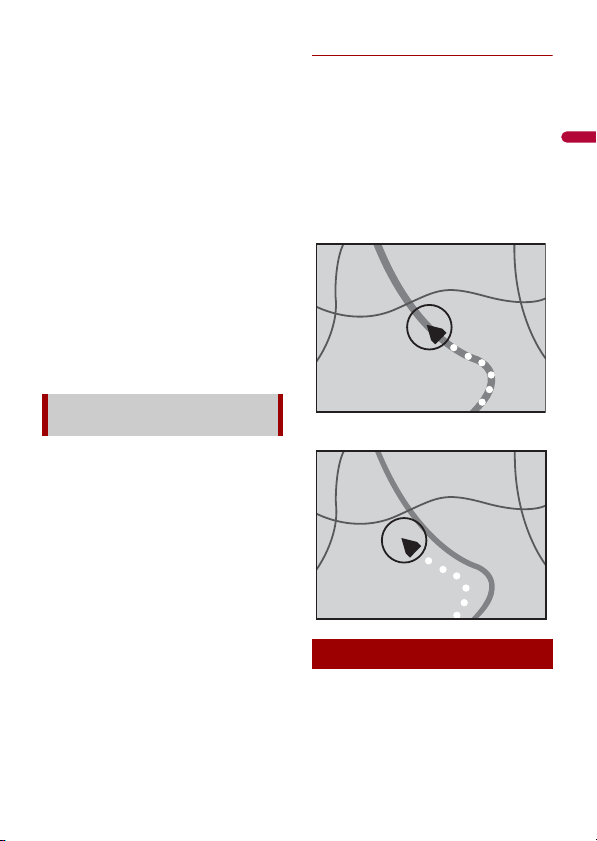
Map matching
As mentioned, the positioning systems
used by this navigation system are
susceptible to certain errors. Their
calculations may, on occasion, place you in
a location on the map where no road
exists. In this situation, the processing
system understands that vehicles travel
only on roads, and can correct your
position by adjusting it to a nearby road.
This is called map matching.
With map matching
Without map matching
Positioning errors are kept to a minimum
by combining GPS, dead reckoning and
map matching. However, in some
situations, these functions may not work
How do GPS and dead reckoning
work together?
Handling large errors
Loading ...
Loading ...
Loading ...