
DanslebonsenspourinsérerlechargeurUSB,insérezla
prisedecourantduchargeurUSB12Vpourcharger,
indicateurde
<
charge.
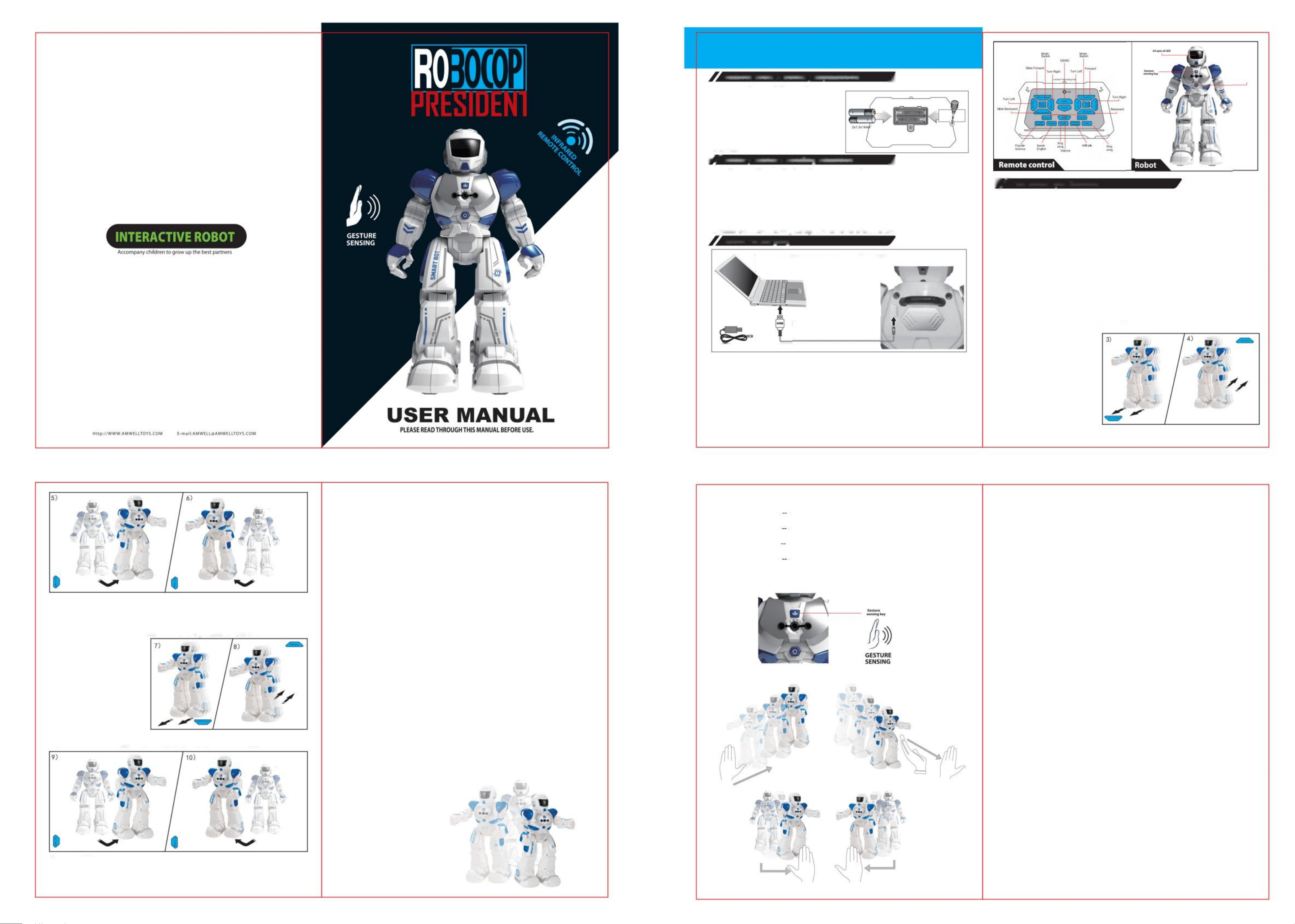
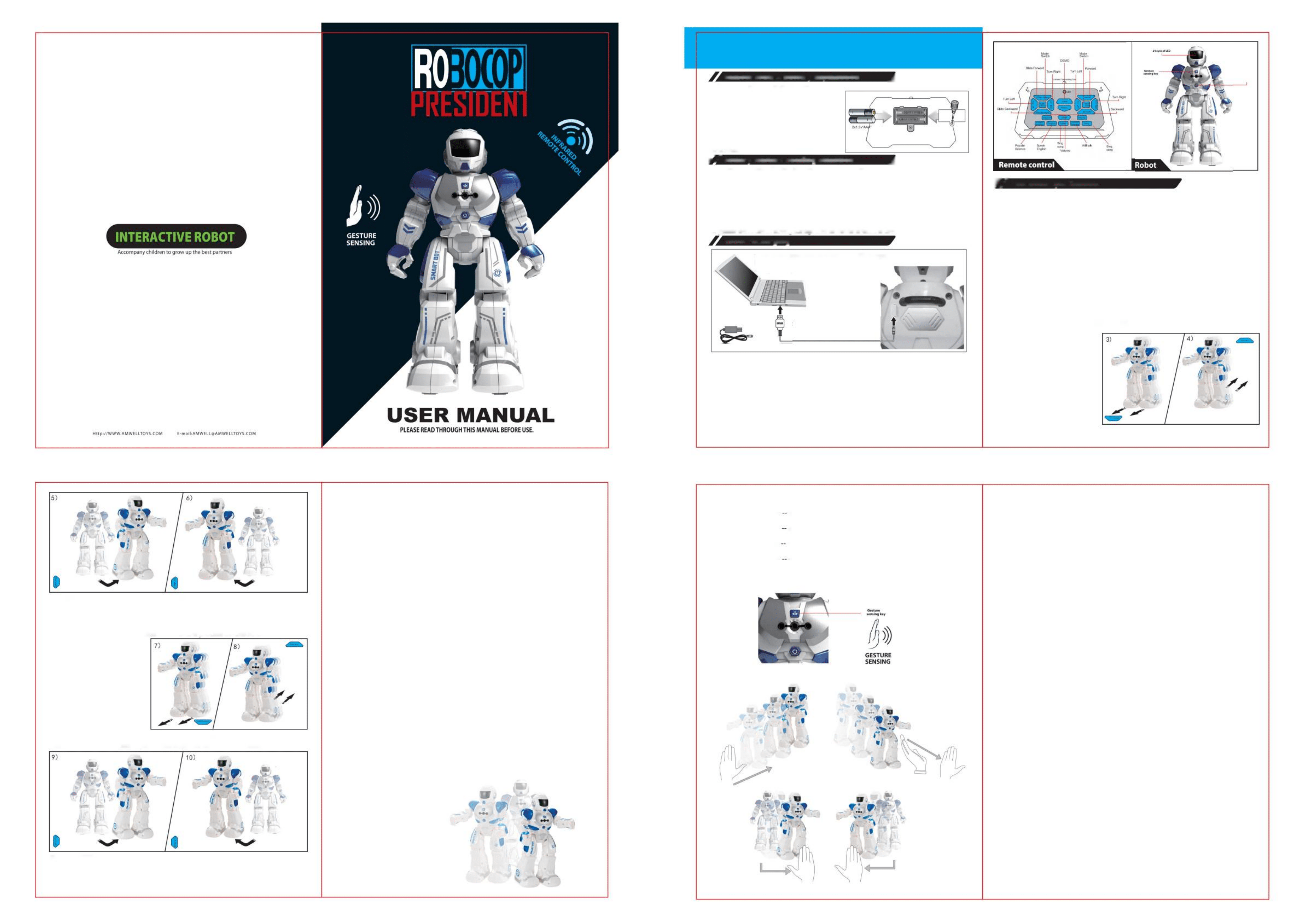
19)lamusiqueMIDI
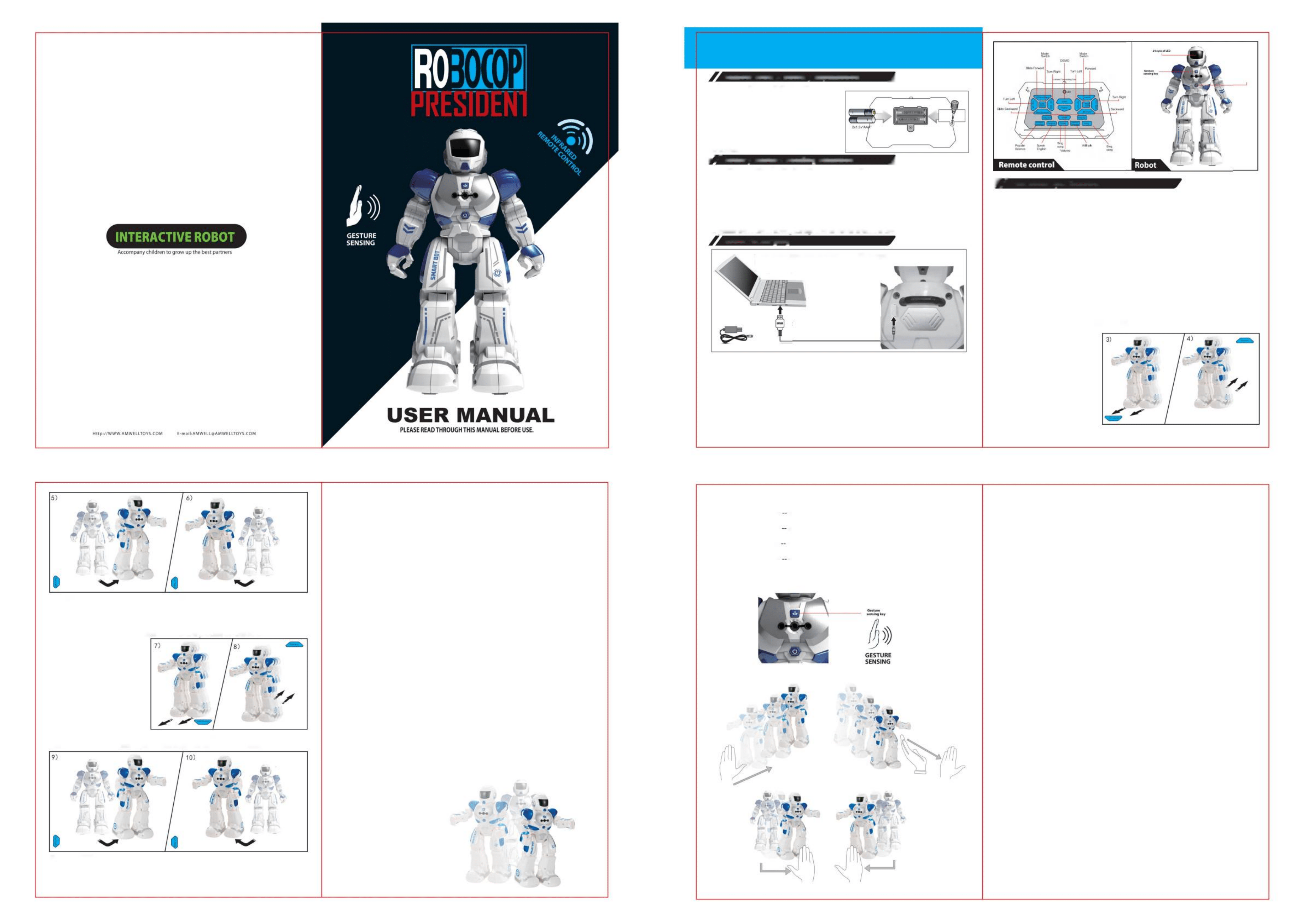
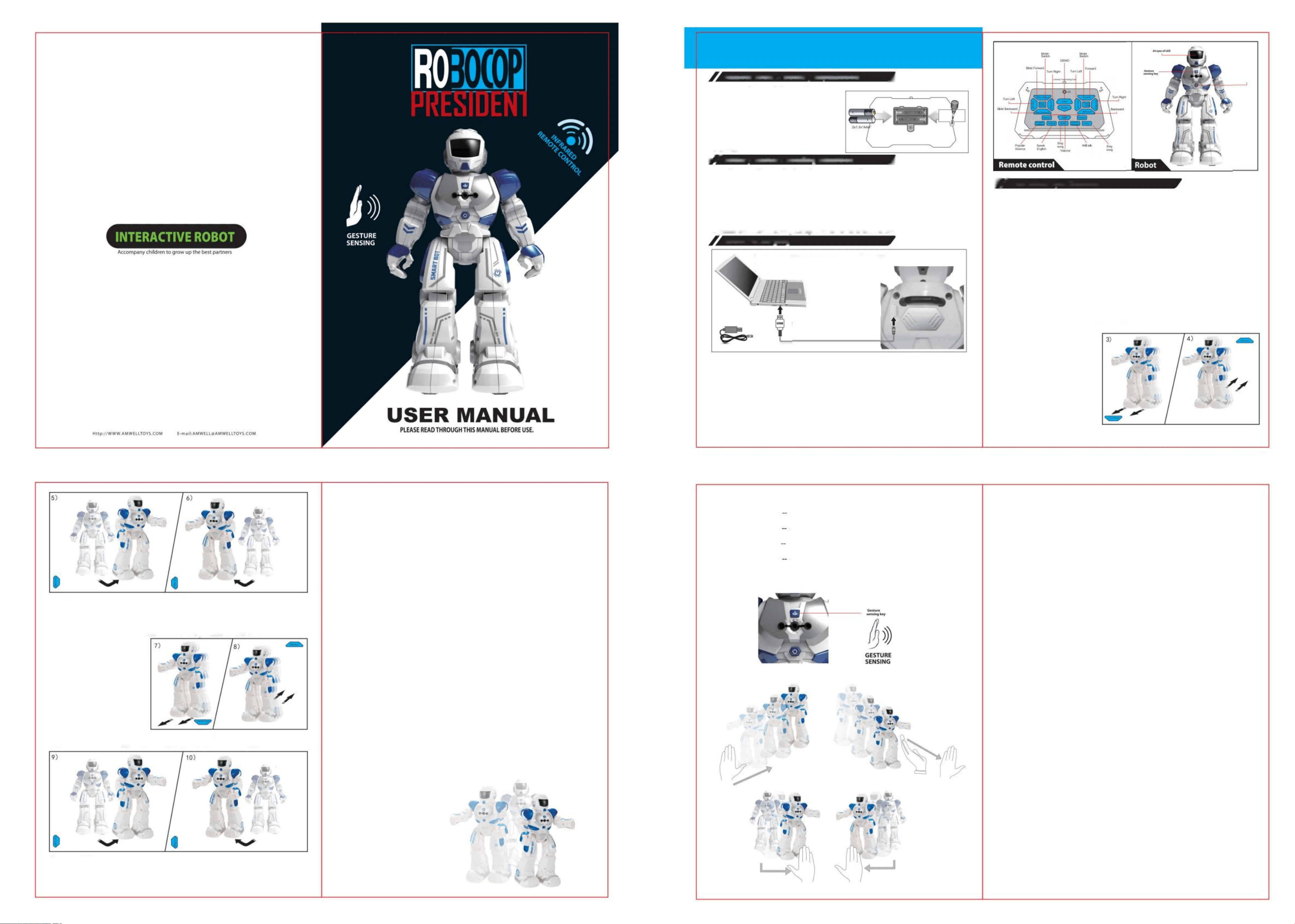
8)SLIDEBACKAprès
avoirreçulesignal"glisseback",
lerobotrecule.Areçuunsignalderetour
detaxi,ileffectueracontinuellementcetteaction.
18)
11)MODE(VITESSEDECOMMUTATEUR
13)levolumepardéfautvolume+volume(septièmeannée)auniveau5A.aprèsavoirreçu
lesignal"volume+",sonnezplusdevolume,enmêmetempsUneinvitevocale,lorsquelavoixatteintle
maximum,puis,iln'yapasd'inviteLevolumevolume(septièmeannée)volumepardéfautauniveau5)Son,
aprèsréceptiondusignal"volume"pourréduirelevolume,enmêmetempsuneinvitevocale,lorsquele
sonatteintl'heure,etpuis,ilyaaucune
Dansleprocessusdejunior,iladeseffetssonorespourcoopérer.
invite.
COULISSANT)
Anglais.............
17)
Aprèslaprésentation
sciences............
—unlangage
Aprèsêtreentrédansl'étatdeprogrammation,ilpeutyavoiruneprogrammationarbitrairepourtoutesles
fonctionsduboutondelancement,vouspouvezappuyersurles15programmationslesplusnombreuses.
Aprèsavoirterminélaprogrammationpourrecevoirlessignauxde«programmation»,lerobotquiesten
fonctiondelaprogrammationlesrejoueunpar
Troispériodesdedémonstrationdemouvements,
chaquepériode.
un.
machine
........lamusique
12)COMMUTATEURDEMODE(VITESSEDEMARCHE)
Appuyezsurleboutonmode2,l'interrupteuravance,marcheenarrière,tournezàgaucheetmarchezàdroite
pouruneactionrapide,l'actiondel'interrupteuràgâchetterevientànouveauàla
14)STOP
Aprèsavoirreçulesignal«stop»,indiquantdansquellescirconstanceslafonctionencoursdoitêtre
immédiatementarrêtée,passezenmodeveille.
normale.
MIDI
unlangage
Appuyezsurlebouton,l'interrupteurdumotif1estlisse,ledoslisse,tournezrapidementetendouceuràgauche
etàdroitedel'action,l'actiondel'interrupteuràgâchetterevientànouveauàla
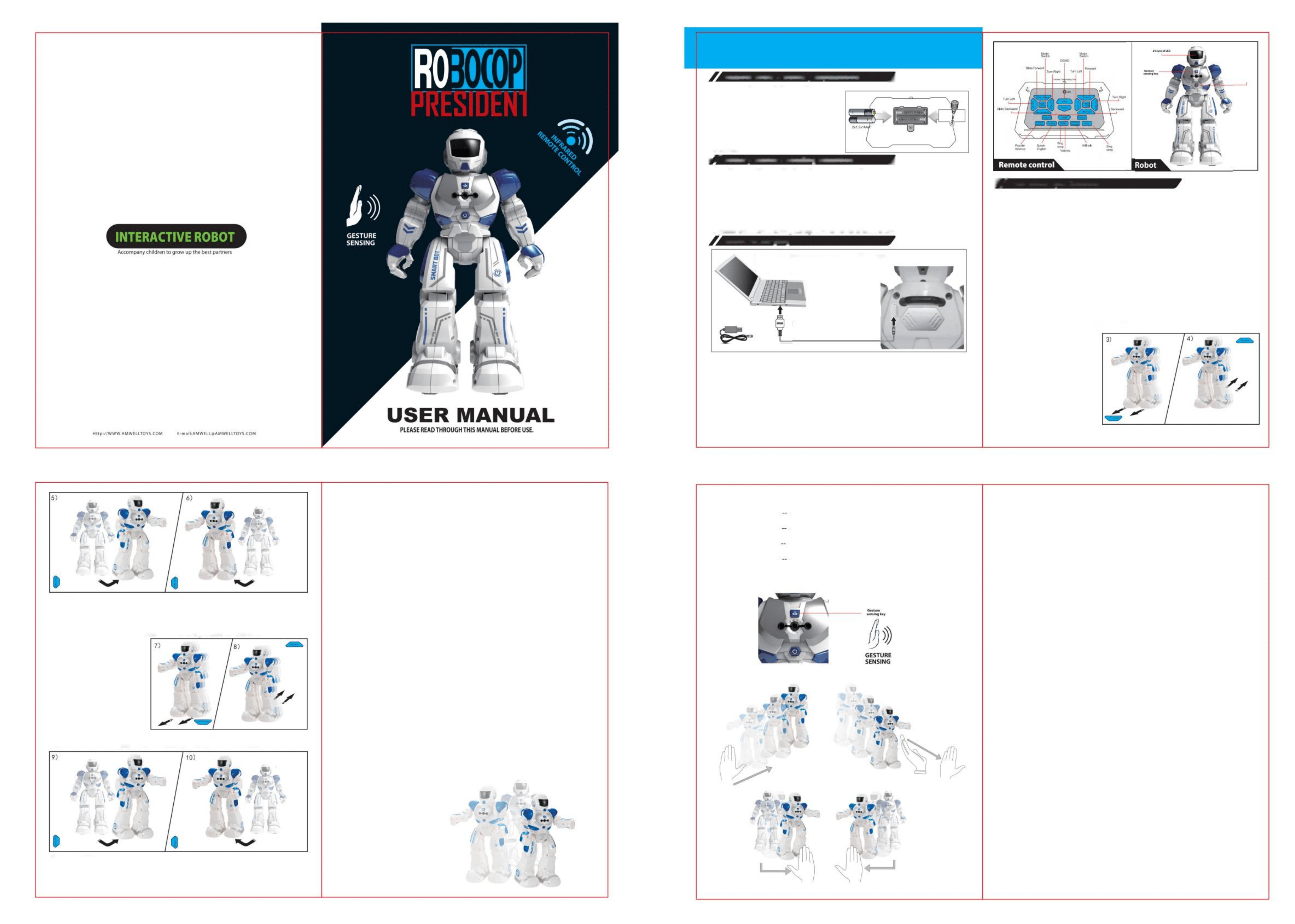
9)GLISSERÀ
GAUCHEAprèsavoirreçulesignal"gauche",faitesglisserlerobotverslagauche(lemoteurcommenceà
tournerversl'arrière,lemoteurdupiedgauchetourneversl'avant).Avoirunebonnecoopérationdansle
processusderotation.
normale.
machine
10)TOURNERÀ
DROITEAprèsavoirreçulesignal"droite",unrobotglisseversladroiteettourneenarrière(rotationdumoteur
versl'avant,rotationdumoteurdupiedgauche).Avoirunebonnecoopérationdansleprocessusde
unlangage
6)
Aprèsavoirreçulesignal«droite»,lerobotdoit
marcheràdroiteetrevenirenarrière(rotationdu
moteurversl'avant,rotationdumoteurdu
piedgauche).Avoirunebonnecoopérationdansle
processusde
7)GLISSERENAVANTAprès
avoirreçulessignaux«glisseren
avant»,lesrobotsavancent.La
diapositiveareçuunsignal«vers
l'avant»,elleeffectuera
continuellementcetteaction.Avoir
unebonnecoopérationaucoursdu
progrès.
rotation.
machine
rotation
Autonomieenveillependant30jours,charge2heures,consommationd'électricité3heures,distancedetélécommande
de3à5mètres.Étatstatiqueaprès30secondespourluimême,unefoistoutesles10secondespourluimême,
jusqu'àdormir,dormiraprès150secondes.
5)TOURNERÀ
GAUCHEAprèsavoirreçulesignal"gauche",
lerobottourneverslagauche(lemoteurcommence
àtournerversl'arrière,lemoteurdupiedgauche
tourneversl'avant).Avoirunebonne
coopérationdansleprocessusderotation.
Aprèsavoirvérifiél'interfacedechargementMINIUSB,l'insertion,l'indicateur,l'arrêtdurobot,nefonctionne
20)chanterunechanson
16)FONCTIONDEDÉMONSTRATIONDETROISDANSESAprèsavoirreçu
lesignal«fonctiondedémonstration»,puisexécutezlafonctiondedémonstration.
—
pas,
impossibled'appuyersurleboutond'alimentation.Doitêtremisdecôtéaprèslalignedechargepourfonctionner
ànouveauselonleboutond'alimentation.Seulement,nechargezpaspourdémarrer.
Nefonctionnepaspourl'étatdecharge.
15)PROGRAMMATIONAprès
réceptiondessignaux"programmation",programmationdurobotoulecturedelaprogrammation.
J.
J.
Lesrobots
II.
démarrent
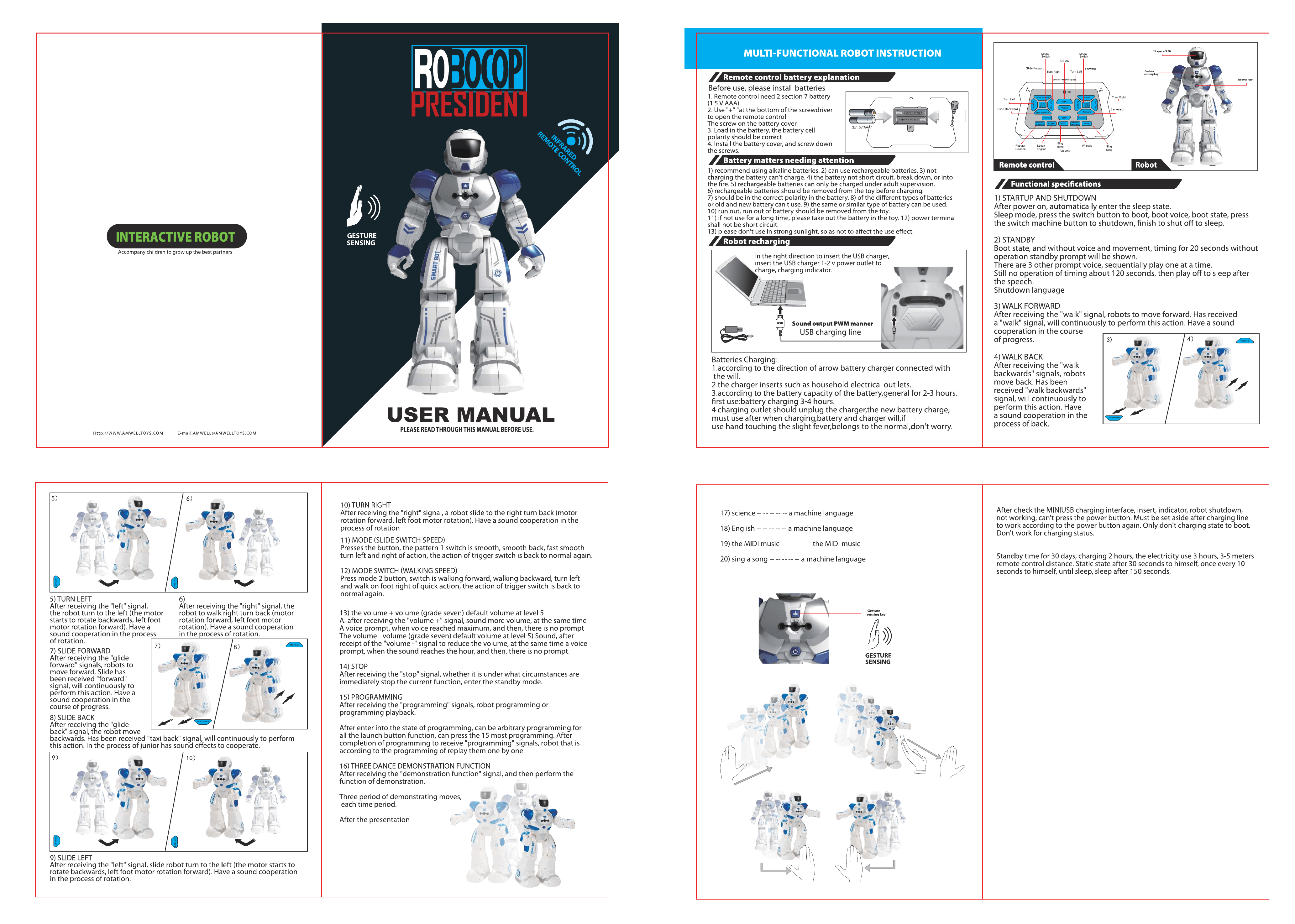
Explicationdelapiledelatélécommande
Avantutilisation,veuillezinstallerlespiles.
1.Latélécommandenécessite2pilessection
7(1,5VAAA)
2.Utilisez"+""aubasdutournevispourouvrirla
télécommande.Lavissurle
couvercledelabatterie.3.Insérezla
batterie,lapolaritédescellulesdelabatteriedoit
êtrecorrecte.4.Installezle
couvercledelabatterieetvissezles
Spécificationsfonctionnelles
1)DÉMARRAGEETARRÊTAprèsla
misesoustension,entrezautomatiquementenétatdeveille.
Modeveille,appuyezsurleboutondecommutationpourdémarrer,démarrezlavoix,étatdedémarrage,
appuyezsurleboutondecommutationdelamachinepourarrêter,terminezpouréteindrepour
SortiesonoredemanièrePWM
Lignedechargement
4)MARCHE
RETOURAprèsavoirreçules
signaux«marchearrière»,les
robotsreculent.Areçuun
signal«marcherenarrière»,il
effectueracontinuellementcette
action.Ayezunebonne
coopérationdansleprocessusde
Chargementdes
batteries:1.Selonladirectionduchargeurdebatterieconnectéàlavolonté.2.Lesinserts
du
chargeurtelsquelesprisesélectriquesdomestiques.3.Selonlacapacitédela
batterie,engénéralpendant2à3heures,premièreutilisation:chargedelabatteriependant3à
4heures.4.Laprisedechargedoitdébrancher
le
chargeur,lanouvellechargedelabatterie,doitêtreutiliséeaprèslechargement,labatterie
etlechargeurleferont,sivousutilisezlamainentouchantunelégère
fièvre,appartientàlanormale,nevousinquiétezpas.
retour.
USB
dormir.
FZ
vis..
Rechargedesrobots
f/Questionsrelativesauxpilesnécessitantune
2)STANDBY
L'étatdedémarrage,etsansvoixnimouvement,uneminuteriede20secondessansopérationen
veilleseraaffichée.
Ilya3autresvoixrapides,jouéesséquentiellementuneàlafois.
Toujourspasd'opérationdechronométrageenviron120secondes,puismiseenveilleaprèsle
discours.
Langue
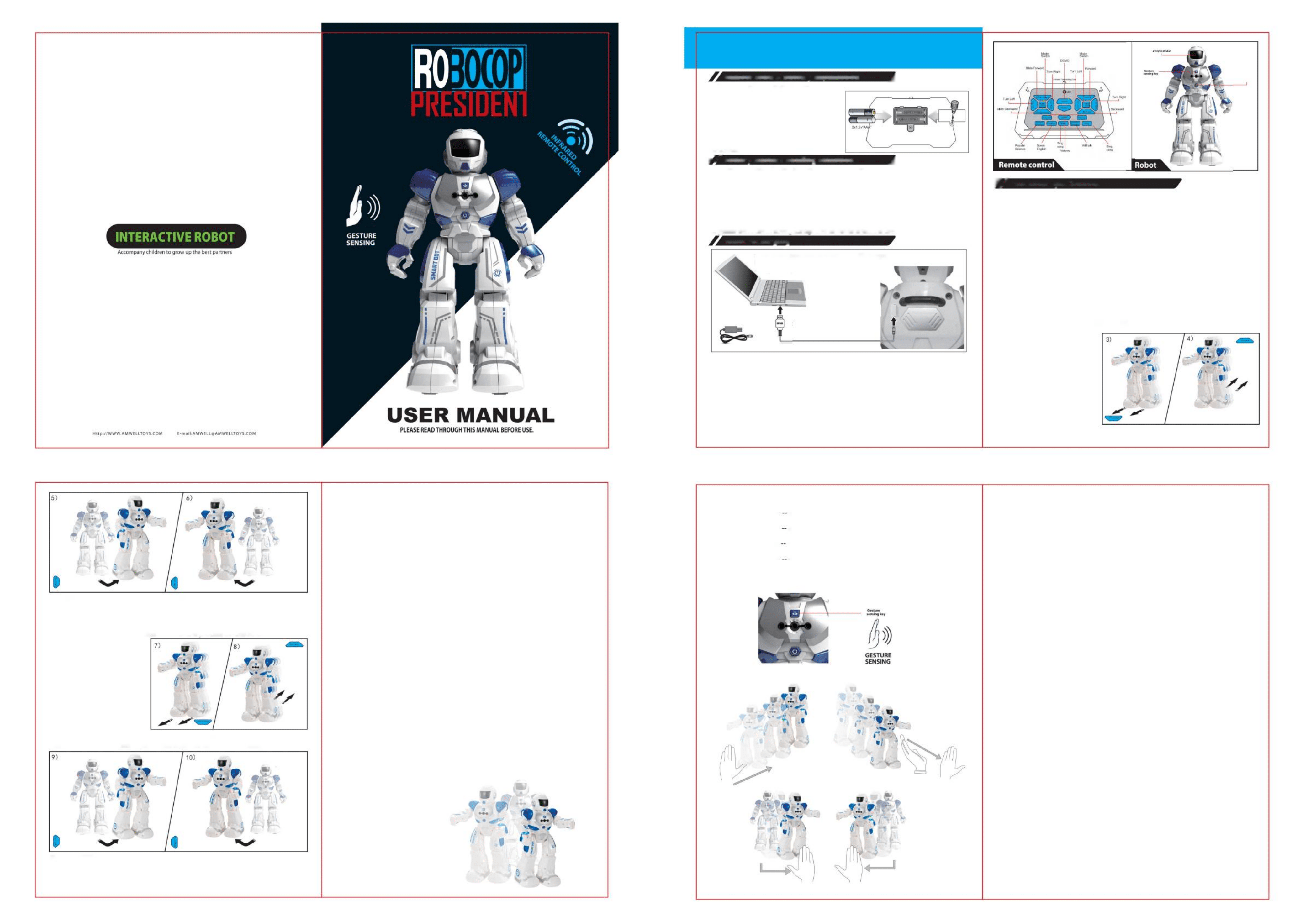
3)MARCHEAVANTAprès
avoirreçulesignal«marche»,lesrobotsavancent.Areçuunsignal«marche»,il
effectueracontinuellementcetteaction.Avoirunebonnecoopérationaucoursduprogrès.
d'arrêt
attention
INSTRUCTIONDEROBOT
particulière
I)recommanded'utiliserdespilesalcalines.2)peututiliserdespilesrechargeables.
3)nepascharger,labatterienepeutpascharger.4)Labatterienecourtcircuitepas,netombepas
enpanneouneprendpasfeu.5)Lespilesrechargeablesnepeuventêtrechargéesquesous
lasurveillanced'unadulte.6)lespilesrechargeablesdoiventêtreretiréesdujouetavant
delescharger.7)doitêtredanslabonnepolaritédanslabatterie.8)lesdifférentstypesdebatteriesou
lesbatteriesanciennesetnouvellesnepeuventpasêtreutilisées.9)untypedebatterieidentiqueou
similairepeutêtreutilisé.10)épuisé,labatterieépuiséedoitêtreretiréedujouet.
II)sivousnel'utilisezpaspendantunelonguepériode,veuillezretirerlabatteriedujouet.12)laborne
d'alimentationnedoitpasêtre
encourtcircuit.13)veuilleznepasutiliserenpleinsoleil,afindenepasaffecterl'effetd'utilisation.
MULTIFONCTIONNEL
Stecken Sie das USB-Ladegerät in die richtige Richtung und stecken
Sie es zum Aufladen in die 1–2-V-Steckdose (Ladeanzeige).
<
Tonausgabe im PWM-Modus
17)
Nach dem Eintritt in den Programmierzustand können Sie alle Starttastenfunktionen beliebig programmieren.
Sie können die 15 meisten Programmiertasten drücken. Nach Abschluss der Programmierung werden
„Programmier“-Signale empfangen. Der Roboter gibt sie gemäß der Programmierung nacheinander wieder.
Wissenschaft............
........ --die MIDI-
14) STOP
Nach dem Empfang des „Stopp“-Signals wird angezeigt, unter welchen Umständen die aktuelle Funktion sofort
gestoppt und in den Standby-Modus gewechselt werden soll.
Musik
19)die MIDI-
— eine
Drei Zeiträume zum Vorführen von Bewegungen, jeder
Zeitraum.
Maschinensprache
Musik
12) MODUSSCHALTER (GEHGESCHWINDIGKEIT)
Drücken Sie die Modus-2-Taste, um zwischen Vorwärtsgehen, Rückwärtsgehen, Linksabbiegen und Gehen mit
dem rechten Fuß der Schnellaktion zu wechseln. Die Aktion des Auslöseschalters ist wieder normal.
8) ZURÜCKGLEITEN
Nach dem Empfang des Signals
„Zurückgleiten“ bewegt sich der Roboter
rückwärts. Nach dem Empfang des Signals „Zurückrollen“ führt er diese Aktion kontinuierlich aus. Während des
18)
11) MODUS
Vorgangs muss der Junior mit Soundeffekten kooperieren.
(SCHIEBESCHALTERGESCHWINDIGKEIT)
Englisch.............
13) Lautstärke + Lautstärke (Stufe 7): Die Standardlautstärke ist auf Stufe 5 eingestellt. A.
Nach Erhalt des Signals „Lautstärke +“ wird der Ton lauter, gleichzeitig ertönt eine Sprachaufforderung, wenn
die Stimme das Maximum erreicht, danach erfolgt keine Aufforderung. Lautstärke – Lautstärke (Stufe 7): Die
Standardlautstärke ist auf Stufe 5 eingestellt. A. Nach Erhalt des Signals „Lautstärke –“ wird die Lautstärke
verringert, gleichzeitig ertönt eine Sprachaufforderung, wenn der Ton die Stunde erreicht, danach erfolgt keine
Aufforderung.
Standby-Zeit 30 Tage, Aufladen 2 Stunden, Stromverbrauch 3 Stunden, Fernbedienungsabstand 3-5 Meter. Statischer
Zustand nach 30 Sekunden, einmal alle 10 Sekunden, bis zum Einschlafen, Einschlafen nach 150
Nach der Präsentation
Sekunden.
5) NACH LINKS
DREHEN Nach dem Empfang des „Links“-
Signals dreht sich der Roboter nach links (der
Motor beginnt, sich rückwärts zu drehen, der
Motor mit dem linken Fuß dreht sich
vorwärts). Achten Sie bei der Drehung auf eine
gute Zusammenarbeit.
Nach dem Überprüfen der MINIUSB-Ladeschnittstelle, Einstecken, Anzeige, Herunterfahren des
16) DEMONSTRATIONSFUNKTION FÜR DREI TÄNZE: Führen Sie nach
dem Empfang des Signals „Demonstrationsfunktion“ die Demonstrationsfunktion aus.
Roboters
funktioniert es nicht, der Netzschalter kann nicht gedrückt werden. Muss nach dem Aufladen beiseite gelegt
werden, damit es gemäß dem Netzschalter wieder funktioniert. Ladezustand zum Booten nicht vorhanden.
Funktioniert nicht für den Ladestatus.
20) sing ein Lied —
eine
Durch Drücken der Taste wird das Muster 1 gewechselt, dann erfolgt eine gleichmäßige Bewegung zurück und eine schnelle,
gleichmäßige Links- und Rechtsdrehung. Anschließend wird die Bewegung des Auslöseschalters wieder normal
15) PROGRAMMIERUNG
Nach dem Empfang der „Programmier“-Signale erfolgt die Roboterprogrammierung bzw. die
Programmierungswiedergabe.
ausgeführt.
Maschinensprache
7) VORWÄRTSGLEITEN Nach
dem Empfang des „Vorwärtsgleiten“-
Signals bewegt sich der Roboter
vorwärts. Der Roboter, der das
„Vorwärtsgleiten“-Signal empfangen
hat, führt diese Aktion kontinuierlich
aus. Achten Sie auf eine gute
Zusammenarbeit während des
Vorwärtsfahrens.
10) RECHTS
ABWÄRTSBIEGEN Nach dem Empfang des „Rechts“-Signals gleitet der Roboter nach rechts und dreht sich
wieder zurück (Motor dreht sich vorwärts, Motor dreht sich mit dem linken Fuß). Achten Sie auf eine gute
Zusammenarbeit während des
9) NACH LINKS
SCHIEBEN Nach dem Empfang des „Links“-Signals dreht sich der Roboter nach links (der Motor beginnt,
sich rückwärts zu drehen, der Motor mit dem linken Fuß dreht sich vorwärts). Achten Sie auf eine gute
Zusammenarbeit während des Drehvorgangs.
Drehvorgangs.
eine Maschinensprache
6)
Nach dem Empfang des „Rechts“-Signals dreht sich
der Roboter nach rechts und zurück (Motor dreht
sich vorwärts, Motor dreht sich mit dem
linken Fuß). Achten Sie auf eine gute
Zusammenarbeit während des Drehvorgangs.
J
J
Roboter
II.
starten
4) ZURÜCKGEHEN
Nach dem Empfang des
„Rückwärtsgehen“-Signals bewegt sich
der Roboter zurück. Wenn das
„Rückwärtsgehen“-Signal empfangen
wurde, führt er diese Aktion kontinuierlich
aus. Achten Sie beim Zurückgehen
auf eine gute Zusammenarbeit.
1) STARTEN UND HERUNTERFAHREN Nach
dem Einschalten wechselt das Gerät automatisch in den Ruhezustand.
Ruhemodus: Drücken Sie die Umschalttaste zum Booten, Boot-Stimme, Boot-Status, drücken Sie die
Umschalttaste der Maschine zum Herunterfahren, Fertig, um in den Ruhezustand zu
USB-
Aufladen der Batterien: 1.
Schließen Sie das Ladegerät in Pfeilrichtung an das Ladegerät an. 2. Schließen Sie das
Ladegerät
an eine Haushaltssteckdose an. 3. Je nach Batteriekapazität der Batterie dauert das
Aufladen in der Regel 2–3 Stunden. Bei der ersten Verwendung dauert das Aufladen der Batterie 3–4
Stunden. 4. Ziehen Sie den Stecker aus der
Ladesteckdose und laden Sie die neue Batterie auf. Nach dem Aufladen müssen Batterie und
Ladegerät wieder verwendet werden. Wenn Sie bei der Verwendung
leichtes Fieber mit der Hand berühren, ist das normal. Machen Sie sich keine Sorgen.
Ladekabel
wechseln.
Roboter aufladen
Erläuterung der Fernbedienungsbatterie
Vor der Verwendung bitte Batterien einlegen . 1.
Die Fernbedienung benötigt 2 Batterien des Typs 7
(1,5 V AAA).
2. Öffnen Sie die Fernbedienung mithilfe des „+“ an der Unterseite
des Schraubendrehers. Schraube an
der Batterieabdeckung. 3. Legen Sie die
Batterie ein. Die Polarität der Batteriezellen muss korrekt
sein. 4. Bringen Sie die
Batterieabdeckung an und schrauben Sie die Schrauben
FZ Funktionale
3) VORWÄRTSGEHEN Nach
dem Empfang des „Geh“-Signals bewegt sich der Roboter vorwärts. Wenn er ein „Geh“-Signal erhalten
hat, führt er diese Aktion kontinuierlich aus. Achten Sie auf eine gute Zusammenarbeit während des
Vorankommens.
Spezifikationen
fest.
f) Hinweise zur Batterie: 1 ) Ich empfehle die
Verwendung von Alkalibatterien. 2) Sie können wiederaufladbare Batterien verwenden. 3) Sie
können die Batterie nicht aufladen. 4) Sie dürfen die Batterie nicht kurzschließen, kaputtgehen oder ins
Feuer werfen. 5) Wiederaufladbare Batterien dürfen nur unter Aufsicht eines Erwachsenen
aufgeladen werden. 6) Wiederaufladbare Batterien müssen vor dem Laden aus dem
Spielzeug entfernt werden. 7) Die Batterie muss die richtige Polarität haben. 8) Sie können keine
unterschiedlichen Batterietypen oder neue und alte Batterien verwenden. 9) Sie können Batterien
desselben oder eines ähnlichen Typs verwenden. 10) Wenn die Batterie leer ist, muss sie aus dem Spielzeug entfernt werden.
II) Bei längerer Nichtbenutzung nehmen Sie bitte die Batterie aus dem Spielzeug. 12) Der Stromanschluss darf nicht kurzgeschlossen
werden. 13) Bitte nicht in der prallen
Sonne verwenden, damit die Wirkung nicht beeinträchtigt wird.
MULTIFUNKTIONALE
2) STANDBY-Boot-
Zustand, und ohne Stimme und Bewegung wird für 20 Sekunden die Aufforderung zum Standby-Betrieb ohne
Betrieb angezeigt.
Es gibt drei weitere Aufforderungsstimmen, die nacheinander jeweils eine abgespielt werden.
Immer noch keine Operation mit Zeitnahme von ca. 120 Sekunden, dann wird nach der Rede das Spiel abgeschaltet
und eingeschlafen.
Shutdown-Sprache
ROBOTERANLEITUNG
I robot partono
Nella giusta direzione per inserire il caricatore USB, inserire
la presa di corrente da 1 -2 V del caricatore USB per
caricare, indicatore di
II.
carica.
<
J
J
f/ Problemi relativi alla batteria che
Modalità PWM di uscita audio
richiedono
attenzione
I) consiglio l'uso di batterie alcaline. 2) può utilizzare batterie ricaricabili. 3)
senza caricare la batteria non è possibile caricarla. 4) La batteria non va in cortocircuito, non
si rompe o non va nel fuoco. 5) le batterie ricaricabili possono essere caricate solo sotto
la supervisione di un adulto. 6) le batterie ricaricabili devono essere rimosse dal
giocattolo prima della ricarica. 7) deve avere la polarità corretta nella batteria. 8) Non è possibile
utilizzare diversi tipi di batterie o batterie vecchie e nuove. 9) è possibile utilizzare batterie
dello stesso tipo o simili. 10) esaurito, la batteria esaurita deve essere rimossa dal giocattolo.
II) se non viene utilizzato per un lungo periodo, estrarre la batteria dal giocattolo. 12) il terminale di alimentazione non
deve essere in cortocircuito. 13)
non utilizzare in condizioni di forte luce solare, in modo da non comprometterne l'effetto d'uso.
Ricarica del robot
Spiegazione della batteria del
FZ Specifiche
3) CAMMINARE AVANTI
Dopo aver ricevuto il segnale "cammina", i robot vanno avanti. Ha ricevuto un segnale di
"camminata", continuerà a eseguire questa azione. Avere una solida cooperazione nel
corso dei progressi.
funzionali
telecomando
1) AVVIO E SPEGNIMENTO Dopo
l'accensione, entra automaticamente nello stato di sospensione.
Modalità di sospensione, premere il pulsante di commutazione per avviare, avviare la voce, stato
di avvio, premere il pulsante di commutazione per spegnere, terminare per spegnere.
2) STANDBY
Verrà visualizzato lo stato di avvio e senza voce e movimento, per 20 secondi senza il messaggio di
standby operativo.
Sono presenti altre 3 voci rapide, riprodurle in sequenza una alla volta.
Ancora nessuna operazione di cronometraggio per circa 120 secondi, poi si va a dormire dopo il
discorso.
Lingua di
Linea di ricarica USB
arresto
4) CAMMINA INDIETRO
Dopo aver ricevuto il segnale
"cammina all'indietro", i robot tornano
indietro. È stato ricevuto il segnale
"cammina all'indietro", eseguirà
Prima dell'uso, installare le batterie 1. Il
telecomando necessita di 2 batterie da 7
sezioni (1,5 V AAA)
2. Utilizzare "+" "nella parte inferiore del cacciavite per
aprire il telecomando La vite sul
coperchio della batteria 3. Caricare la
batteria, la polarità della cella della batteria deve
essere corretta 4. Installare il
coperchio della batteria e avvitare le
continuamente questa azione. Avere
una buona cooperazione nel processo
di ritorno.
viti .
Ricarica delle batterie:
1.secondo la direzione della freccia del caricabatteria collegato alla volontà. 2. gli inserti del
ISTRUZIONI ROBOT
caricabatterie come le prese elettriche domestiche. 3. in base alla capacità della
batteria, in generale per 2-3 ore, primo utilizzo: ricarica della batteria 3-4 ore. 4. La presa di ricarica
deve scollegare il caricabatterie, la nuova
carica della batteria, deve essere utilizzata dopo la ricarica, la batteria e il caricabatterie, se si
usa la mano per toccare la leggera febbre, appartengono alla normalità,
non preoccuparti.
MULTIFUNZIONALI
19)la musica MIDI
8) SLIDE BACK
Dopo aver ricevuto il segnale di
"scivolata indietro", il robot si muove
all'indietro. È stato ricevuto il segnale "taxi back", continuerà a eseguire questa azione. Nel processo di
20) cantare una canzone
junior ci sono effetti sonori per cooperare.
—
Tempo di standby per 30 giorni, ricarica 2 ore, consumo di elettricità 3 ore, distanza del telecomando di 3-5
metri. Stato statico dopo 30 secondi a se stesso, una volta ogni 10 secondi a se stesso, fino al sonno,
sonno dopo 150
15) PROGRAMMAZIONE
Dopo aver ricevuto i segnali di "programmazione", programmare il robot o programmare
la riproduzione.
secondi.
5) GIRA A SINISTRA
Dopo aver ricevuto il segnale "sinistra",
il robot gira a sinistra (il motore inizia a ruotare
all'indietro, il motore del piede sinistro ruota
in avanti). Avere una solida cooperazione
nel processo di rotazione.
10) GIRA A DESTRA
Dopo aver ricevuto il segnale "destra", il robot scivola a destra e gira indietro (rotazione del motore in
avanti, rotazione del motore del piede sinistro). Avere una solida cooperazione nel processo di
un linguaggio
16) FUNZIONE DIMOSTRATIVA DI TRE DANZE Dopo aver ricevuto
il segnale della "funzione dimostrativa", eseguire la funzione dimostrativa.
macchina
rotazione
un linguaggio
Premendo il pulsante, l'interruttore del modello 1 è fluido, liscio all'indietro, gira velocemente e fluidamente
a sinistra e a destra dell'azione, l'azione dell'interruttore del grilletto torna di nuovo alla
9) SCORRIMENTO
A SINISTRA Dopo aver ricevuto il segnale "sinistra", far scorrere il robot verso sinistra (il motore
inizia a ruotare all'indietro, il motore del piede sinistro ruota in avanti). Avere una solida cooperazione
nel processo di rotazione.
normalità.
macchina
........ --la musica
7) SCORREVOLE IN
AVANTI Dopo aver ricevuto il
segnale "scivola in avanti", i robot
si muovono in avanti. La
diapositiva ha ricevuto il segnale
"avanti", eseguirà continuamente
questa azione. Avere una solida
cooperazione nel corso dei
progressi.
MIDI
Dopo aver controllato l'interfaccia di ricarica MINIUSB, inserire, indicatore, arresto del robot, non
funzionamento, impossibile premere il pulsante di accensione. Deve essere messo da parte dopo aver
caricato la linea per funzionare nuovamente con il pulsante di accensione. Solo non caricare lo stato per l'avvio.
Non funziona per lo stato di
14) STOP
Dopo aver ricevuto il segnale di "stop", in quali circostanze viene immediatamente interrotta la funzione
corrente, entrare in modalità standby.
carica.
- un linguaggio macchina
17)
Dopo essere entrati nello stato di programmazione, è possibile programmare arbitrariamente tutte
le funzioni del pulsante di avvio, è possibile premere la maggior parte dei 15 programmi. Dopo il
completamento della programmazione per ricevere i segnali di "programmazione", il robot che è in
base alla programmazione li riprodurrà uno per uno.
scienza.........
6)
Dopo aver ricevuto il segnale "giusto", il robot
per camminare a destra gira indietro (rotazione
del motore in avanti, rotazione del motore
del piede sinistro). Avere una solida
cooperazione nel processo di
Tre periodi di dimostrazione delle mosse, ogni
periodo di tempo.
rotazione.
13) volume + volume (grado sette) volume predefinito al livello 5 A. dopo aver ricevuto
il segnale "volume +", aumenta il volume, allo stesso tempo Un messaggio vocale, quando la voce
raggiunge il massimo, quindi non viene visualizzato alcun messaggio Il volume - volume (grado sette)
volume predefinito al livello 5) Suono, dopo aver ricevuto il segnale "volume -" per ridurre il volume,
allo stesso tempo un messaggio vocale, quando il suono raggiunge l'ora, e poi, si sente nessun
suggerimento.
18)
Dopo la presentazione
Inglese..................
11) MODALITÀ (VELOCITÀ DELL'INTERRUTTORE A SLITTA)
12) INTERRUTTORE DI MODALITÀ (VELOCITÀ DI CAMMINATA)
Premere il pulsante modalità 2, l'interruttore cammina in avanti, cammina all'indietro, gira a sinistra e
cammina con il piede a destra dell'azione rapida, l'azione dell'interruttore a grilletto torna di nuovo alla
normalità.
Losrobotscomienzan
EnladireccióncorrectaparainsertarelcargadorUSB,
inserteelcargadorUSBenlatomadecorrientede12
vparacargar,indicadorde
II.
carga.
<
j
j
1)INICIOYAPAGADODespuésdel
encendido,ingresaautomáticamentealestadodesuspensión.
Mododesuspensión,presioneelbotóndelinterruptorparainiciar,vozdeinicio,estadodeinicio,
presioneelbotóndelinterruptordelamáquinaparaapagar,termineparaapagary
MododesalidadesonidoPWM
dormir.
Antesdeusar,instalelasbaterías1.Elcontrol
remotonecesita2bateríasdelasección7(1,5
VAAA)
2.Utilice"+""enlaparteinferiordeldestornilladorpara
abrirelcontrolremoto.Eltornillo
enlatapadelabatería.3.Carguela
batería,lapolaridaddelasceldasdelabatería
debesercorrecta.4.Instalela
tapadelabateríayatornillelos
3)CAMINARADELANTE
Despuésderecibirlaseñalde"caminar",losrobotsavanzan.Harecibidounaseñalde
"caminar",continuamenterealizaráestaacción.Tenerunasanacooperaciónenelcursodel
progreso.
tornillos..
f/Cuestionesdebateríaquerequierenatención
2)STANDBYSe
mostraráelestadodeinicioysinvoznimovimiento,eltiempodurante20segundossinavisode
operaciónenespera.
Hayotras3indicacionesdevoz,quesereproducensecuencialmenteunaalavez.
Todavíanohayoperacióndecronometrajedeunos120segundos,luegojuegaadormirdespués
deldiscurso.
Idiomadeapagado
I)
Recomiendousarbateríasalcalinas.2)puedeutilizarbateríasrecargables.3)nocargar
labateríanosepuedecargar.4)labateríanocortocircuite,rompaoseincendie.5)las
bateríasrecargablessólosepuedencargarbajolasupervisióndeunadulto.6)Las
bateríasrecargablesdebenretirarsedeljugueteantesdecargarlas.7)debetener
lapolaridadcorrectaenlabatería.8)Nosepuedenutilizarlosdiferentestiposdebateríaso
bateríasnuevasyviejas.9)sepuedeutilizarelmismotipodebateríaosimilar.10)Se
agota,sedeberetirarlabateríadeljuguete.
II)sinolousadurantemuchotiempo,saquelabateríadeljuguete.12)elterminaldealimentaciónnodeberá
sufrircortocircuitos.13)nolo
utilicebajolaluzsolarintensaparanoafectarelefectodeuso.
Recargade
4)CAMINARHACIA
ATRÁSDespuésderecibirlas
señalesde"caminarhaciaatrás",los
robotsretroceden.Seharecibido
laseñalde"caminarhaciaatrás",
realizaráestaaccióncontinuamente.
Tenerunabuenacooperaciónenel
procesode
Cargadebaterías:1.
Segúnladireccióndelaflecha,elcargadordebateríaestáconectadoconlavoluntad.2.
El
cargadorseinsertaentomasdecorrientedomésticas.3.Segúnlacapacidadde
la
batería,generaldurante23horas,primeruso:cargadelabatería34horas.4.Latomade
cargadebedesconectarelcargador,lanueva
cargadelabatería,debeusarsedespuésdelacarga,labateríayelcargador,siusalamano
tocandolafiebreleve,pertenecealonormal,nosepreocupe.
regreso.
robots
INSTRUCCIÓNDEROBOT
Explicacióndelabateríadelcontrol
FZEspecificaciones
LíneadecargaUSB
funcionales
remoto
MULTIFUNCIONAL
17)
Despuésdeingresaralestadodeprogramación,puederealizarseunaprogramaciónarbitrariapara
todaslasfuncionesdelbotóndeinicio,puedepresionarlos15másprogramados.Despuésde
completarlaprogramaciónpararecibirseñalesde"programación",elrobotqueestádeacuerdocon
laprogramaciónlasreproduceunaporuna.
ciencia............
........lamúsica
Tresperíodosdemovimientosdedemostración,
cadaperíododetiempo.
MIDI
19)lamúsica
unlenguajede
14)DETENER
Despuésderecibirlaseñalde"detener",siesbajoquécircunstanciassedetieneinmediatamentela
funciónactual,ingresealmododeespera.
máquina
MIDI
12)INTERRUPTORDEMODO(VELOCIDADDEMARCHA)
PresioneelbotónModo2,elinterruptorcaminahaciaadelante,haciaatrás,giraalaizquierdaycaminaa
piehacialaderechadeacciónrápida,laaccióndelinterruptordegatillovuelvealanormalidad.
8)DESLIZARSE
HACIAATRÁSDespuésde
recibirlaseñalde"deslizarsehacia
atrás",elrobotsemuevehaciaatrás.Seharecibidolaseñalderegresodeltaxiyrealizaráestaacción
18)
11)MODO(VELOCIDADDELINTERRUPTOR
continuamente.Enelproceso,eljoventieneefectosdesonidoparacooperar.
DESLIZANTE)
Inglés.............
13)elvolumen+volumen(gradosiete)volumenpredeterminadoenelnivel5A.
despuésderecibirlaseñal"volumen+",suenamásvolumen,almismotiempoUnmensajedevoz,cuando
lavozalcanzaelmáximo,yluego,nohayningúnmensajeElvolumenvolumen(gradosiete)volumen
predeterminadoenelnivel5)Sonido,despuésderecibirlaseñal"volumen"parareducirelvolumen,
almismotiempounmensajedevoz,cuandoelsonidollegaalahora,yluego,haysinaviso.
Tiempodeesperade30días,cargade2horas,consumodeelectricidadde3horas,distanciadecontrolremoto
de3a5metros.Estadoestáticodespuésde30segundosparasímismo,unavezcada10segundospara
símismo,hastadormir,dormirdespuésde150
Despuésdelapresentación
segundos.
5)GIRARALA
IZQUIERDADespuésderecibirlaseñal
"izquierda",elrobotgirahacialaizquierda(el
motorcomienzaagirarhaciaatrás,elmotor
delpieizquierdogirahaciaadelante).
Tenerunasanacooperaciónenelproceso
derotación.
DespuésdeverificarlainterfazdecargaMINIUSB,insertar,indicador,apagadodelrobot,nofunciona,no
sepuedepresionarelbotóndeencendido.Debedejarseaunladodespuésdecargarlalíneaparaque
vuelvaafuncionardeacuerdoconelbotóndeencendido.Soloquenoestéenestadodecargaparaarrancar.
Nofuncioneparaelestadode
16)FUNCIÓNDEDEMOSTRACIÓNDETRESBAILESDespuésderecibirla
señalde"funcióndedemostración",realicelafuncióndedemostración.
carga.
unlenguajede
Alpresionarelbotón,elinterruptordelpatrón1essuave,laparteposterioressuave,elgirorápidoysuave
hacialaizquierdayhacialaderechadelaacción,laaccióndelinterruptordegatillovuelveala
20)cantaunacanción
15)PROGRAMACIÓN
Despuésderecibirlasseñalesde"programación",programacióndelrobotoreproducciónde
laprogramación.
normalidad.
máquina
7)DESLIZARSEHACIA
ADELANTEDespuésderecibir
lasseñalesde"deslizarsehacia
adelante",losrobotsdeben
avanzar.Ladiapositivaha
recibidounaseñal"adelante"y
realizaráestaaccióncontinuamente.
Tenerunasanacooperaciónen
elcursodelprogreso.
10)GIRARALA
DERECHADespuésderecibirlaseñal"derecha",unrobotsedeslizahacialaderechaygirahaciaatrás
(rotacióndelmotorhaciaadelante,rotacióndelmotordelpieizquierdo).Tenerunabuenacooperación
enelprocesode
9)DESLIZAMIENTO
ALAIZQUIERDADespuésderecibirlaseñal"izquierda",desliceelrobothacialaizquierda(elmotor
comienzaagirarhaciaatrás,elmotordelpieizquierdogirahaciaadelante).Tenerunasanacooperación
enelprocesoderotación.
rotación.
unlenguajedemáquina
6)
Despuésderecibirlaseñal"derecha",elrobot
caminahacialaderechaygirahaciaatrás
(rotacióndelmotorhaciaadelante,
rotacióndelmotordelpieizquierdo).Teneruna
sanacooperaciónenelprocesoderotación.
2. Użyj "+" "na dole śrubokręta, aby otworzyć pilota. Śruba na
pokrywie baterii 3. Włóż baterię,
polaryzacja ogniw baterii powinna być
prawidłowa 4. Załóż pokrywę baterii i przykręć
We właściwym kierunku, aby włożyć ładowarkę USB, włóż ładowarkę
USB do gniazda zasilania 1–2 V, aby naładować, wskaźnik ładowania.
śruby .
II) jeśli nie będziesz używać zabawki przez dłuższy czas, wyjmij baterię z zabawki. 12) zacisk zasilania nie powinien być zwarty. 13) proszę
nie używać w silnym świetle
słonecznym, aby nie wpływać na efekt użytkowania.
<
Wyjście dźwięku w sposób PWM
język maszynowy
7) PRZESUŃ DO PRZODU Po
otrzymaniu sygnałów „przesuwaj się
do przodu” roboty ruszają do przodu.
Slajd otrzymał sygnał „do przodu”,
będzie stale wykonywał tę czynność.
Ściśle współpracuj w trakcie postępu.
10) SKRĘT W PRAWO
Po otrzymaniu sygnału „w prawo” robot przesuwa się w prawo i zawraca do tyłu (obrót silnika do
przodu, obrót silnika lewą nogą). Ściśle współpracuj w procesie
9) PRZESUŃ W
LEWO Po otrzymaniu sygnału „w lewo” przesuń robota w lewo (silnik zacznie się obracać do tyłu,
silnik lewej stopy do przodu). Ściśle współpracuj w procesie rotacji.
rotacji
język maszynowy
Czas czuwania 30 dni, ładowanie 2 godziny, zużycie energii elektrycznej 3 godziny, odległość zdalnego
sterowania 3-5 metrów. Stan statyczny po 30 sekundach dla siebie, raz na 10 sekund dla siebie, aż do
zaśnięcia, sen po 150 sekundach.
5) SKRĘT W LEWO Po
otrzymaniu sygnału „w lewo” robot skręca w
lewo (silnik zaczyna obracać się do tyłu, silnik lewej
stopy do przodu). Ściśle współpracuj w procesie
rotacji.
20) zaśpiewaj piosenkę
16) FUNKCJA POKAZU TRZECH TAŃCZY Po odebraniu sygnału „funkcji
demonstracyjnej” należy wykonać funkcję pokazu.
—
19)muzyka
15) PROGRAMOWANIE Po
odebraniu sygnałów „programowania”, programowanie robota lub odtwarzanie
programowania.
MIDI
8) PRZESUŃ SIĘ DO
TYŁU Po otrzymaniu sygnału
„przesuń się do tyłu” robot porusza
się do tyłu. Otrzymano sygnał powrotu taksówką, będzie on stale wykonywał tę czynność. W procesie
18)
11) TRYB (SZYBKOŚĆ PRZEŁĄCZNIKA)
Naciska przycisk, przełącznik wzoru 1 działa płynnie, gładki tył, szybki, płynny skręt w lewo i w prawo,
działanie przełącznika spustowego wraca do
junior ma efekty dźwiękowe do współpracy.
normy.
Angielski...........
13) głośność + głośność (klasa siódma) domyślna głośność na poziomie 5 A. po
otrzymaniu sygnału „głośność +” zabrzmi głośniej, jednocześnie zabrzmi komunikat głosowy, gdy
głos osiągnie maksimum, a następnie nie ma monitu Głośność - głośność (stopień siódmy)
domyślna głośność na poziomie 5) Dźwięk, po otrzymaniu sygnału "głośność" - w celu
zmniejszenia głośności, jednocześnie pojawia się komunikat głosowy, gdy dźwięk osiągnie godzinę,
a następnie nastąpi brak podpowiedzi.
17)
6)
Po otrzymaniu sygnału „w prawo” robot do
chodzenia w prawo zawraca (obrót silnika do
przodu, obrót silnika lewą nogą). Ściśle
współpracuj w procesie
Po prezentacji
rotacji.
nauka...........
Po sprawdzeniu interfejsu ładowania MINIUSB, wkładki, wskaźnika, wyłączenie robota, nie działa,
nie można nacisnąć przycisku zasilania. Należy odłożyć na bok po linii ładowania, aby ponownie
działać zgodnie z przyciskiem zasilania. Tylko nie ładuj stanu, aby uruchomić.
Nie działa dla stanu
Po wejściu w stan programowania można dowolnie zaprogramować wszystkie funkcje przycisku
uruchamiania, można nacisnąć 15 najbardziej programowanych. Po zakończeniu
programowania w celu odbioru sygnałów „programujących”, robot zgodnie z zaprogramowaniem
odtwarza je jeden po
Trzy okresy demonstracji ruchów, każdy okres.
drugim.
ładowania.
— język maszynowy
........... --muzyka
12) PRZEŁĄCZNIK TRYBU (PRĘDKOŚĆ CHODZENIA)
Naciśnij przycisk trybu 2, przełącznik idzie do przodu, idzie do tyłu, skręca w lewo i idzie pieszo w
prawo od szybkiego działania, działanie przełącznika spustowego wraca do
14) STOP Po
otrzymaniu sygnału „stop”, czy to w jakich okolicznościach należy natychmiast zatrzymać bieżącą
funkcję, należy przejść do trybu czuwania.
normy.
MIDI
J
J
Startują roboty
4) WSTECZ Po
otrzymaniu sygnału „chodź do
tyłu” roboty cofają się. Otrzymał
sygnał „chodź do
II.
tyłu”,
1) URUCHAMIANIE I WYŁĄCZANIE Po
włączeniu zasilania automatycznie przechodzi w stan uśpienia.
Tryb uśpienia, naciśnij przycisk przełącznika, aby uruchomić komputer, uruchom głos, stan rozruchu,
naciśnij przycisk przełącznika urządzenia, aby wyłączyć, zakończ, aby wyłączyć tryb
Linia ładowania
Ładowanie akumulatorów:
1. zgodnie z kierunkiem strzałki, ładowarka akumulatorów podłączona do woli. 2. gniazda
ładowarki,
takie jak domowe gniazdka elektryczne. 3. w zależności od pojemności akumulatora,
ogólnie przez 2-3 godziny, pierwsze użycie: ładowanie akumulatora 3-4 godziny. 4. Gniazdo
ładowania powinno odłączyć ładowarkę, nowy
akumulator należy naładować po ładowaniu, akumulator i ładowarka będą działać, jeśli użyjesz
ręki dotykając lekkiej gorączki, jest to normalne, nie martw
będzie stale wykonywać tę
czynność. Miej solidną współpracę
w procesie zwrotu.
się.
USB
uśpienia.
Ładowanie robota
Wyjaśnienie baterii pilota
Przed użyciem należy zainstalować baterie .
1. Pilot wymaga baterii 2 sekcji 7 (1,5 V
FZ Specyfikacje
3)MASZ DO PRZODU Po
otrzymaniu sygnału „spaceru” roboty ruszają do przodu. Otrzymał sygnał „chodzenia”,
będzie stale wykonywał tę czynność. Ściśle współpracuj w trakcie postępu.
funkcjonalne
AAA)
f/ Sprawy związane z baterią wymagające uwagi
I) zalecam używanie baterii alkalicznych. 2) może używać akumulatorów. 3) brak
ładowania, akumulator nie może zostać naładowany. 4) akumulator nie ulega zwarciu,
uszkodzeniu lub zapaleniu. 5) akumulatory można ładować wyłącznie pod nadzorem
osoby dorosłej. 6) Akumulatory należy wyjąć z zabawki przed ładowaniem. 7)
powinien mieć odpowiednią polaryzację w akumulatorze. 8) różnych typów baterii lub starej i
nowej baterii, których nie można używać. 9) można zastosować ten sam lub podobny
typ baterii. 10) wyczerpany, wyczerpany akumulator należy wyjąć z zabawki.
INSTRUKCJA O ROBOCIE
2) STANDBY
Stan rozruchu, bez głosu i ruchu, wyświetlony zostanie czas 20 sekund bez komunikatu o
gotowości do działania.
Istnieją 3 inne głosy podpowiedzi, odtwarzaj je sekwencyjnie, pojedynczo.
Nadal nie ma operacji pomiaru czasu około 120 sekund, a następnie po przemówieniu graj do
snu.
Język wyłączania
WIELOFUNKCYJNYM
II) Als u het speelgoed langere tijd niet gebruikt, verwijder dan de batterij uit het speelgoed. 12) De voedingsterminal
mag geen kortsluiting
veroorzaken. 13) Gelieve niet te gebruiken in fel zonlicht, om het gebruikseffect niet te beïnvloeden.
In de juiste richting om de USB-oplader te plaatsen, plaatst
u de USB-oplader 1 -2 V stopcontact om op te laden,
oplaadindicator.
<
Geluidsuitgang PWM-manier
17)
Na het invoeren van de programmeerstatus, kan willekeurige programmering zijn voor alle
startknopfuncties, kan op de 15 meest programmering worden gedrukt. Na voltooiing van het
programmeren om "programmeer"-signalen te ontvangen, speelt de robot, volgens de
programmering, deze één voor één af.
wetenschap...............
........ --de MIDI-
14) STOP
Nadat u het "stop"-signaal heeft ontvangen, of het nu onder welke omstandigheden is, wordt de
huidige functie onmiddellijk stopgezet, gaat u naar de standby-modus.
muziek
19)de MIDI-
– een
Drie periodes waarin zetten worden
gedemonstreerd, elke tijdsperiode.
machinetaal
muziek
12) MODUSSCHAKELAAR (LOOPSNELHEID)
Druk op de modus 2-knop, de schakelaar is vooruit lopen, achteruit lopen, draai links en loop te
voet rechts van de snelle actie, de actie van de trekkerschakelaar is weer normaal.
8) SCHUIF TERUG
Nadat de robot het signaal
"achteruit glijden" heeft ontvangen,
beweegt hij achteruit. Is het signaal 'taxi terug' ontvangen, zal deze actie continu uitvoeren. Tijdens
18)
het proces moet junior geluidseffecten meewerken.
Engels.............
13) het volume + volume (graad zeven) standaardvolume op niveau 5 A. na
ontvangst van het "volume +" signaal, klinkt meer volume, tegelijkertijd Een gesproken prompt,
wanneer de stem het maximum bereikt, en dan is er geen prompt Het volume - volume (graad
zeven) standaardvolume op niveau 5) Geluid, na ontvangst van het "volume -" signaal om het
volume te verlagen, tegelijkertijd een stemprompt, wanneer het geluid het uur bereikt, en dan is er
geen prompt.
Stand-bytijd gedurende 30 dagen, opladen 2 uur, elektriciteitsverbruik 3 uur, afstand van de
afstandsbediening 3-5 meter. Statische toestand na 30 seconden voor zichzelf, eens per 10 seconden
voor zichzelf, tot de slaap, slaap na 150
Na de presentatie
seconden.
5) DRAAI LINKS
Nadat de robot het signaal "links" heeft
ontvangen, draait hij naar links (de motor
begint achteruit te draaien, de linkervoetmotor
draait vooruit). Zorg voor een goede
samenwerking tijdens het rotatieproces.
Na controle van de MINIUSB-oplaadinterface, insert, indicator, robotuitschakeling, werkt niet, kan
niet op de aan / uit-knop drukken. Moet na de oplaadlijn opzij worden gezet om weer volgens de
aan / uit-knop te werken. Laad de status alleen niet op om op te starten.
Werk niet voor de
16) DEMONSTRATIEFUNCTIE DRIE DANSEN Nadat u het
signaal "demonstratiefunctie" hebt ontvangen, voert u vervolgens de demonstratiefunctie uit.
oplaadstatus.
20) zing een lied —
een
11) MODUS (SLIDE SWITCH SNELHEID)
Druk op de knop, de patroon 1-schakelaar is soepel, soepel terug, snel soepel naar links en rechts
van actie, de actie van de trekkerschakelaar is weer
15) PROGRAMMEREN
Na ontvangst van de "programmeer"-signalen, robotprogrammering of programmering
afspelen.
normaal.
machinetaal
7) SCHUIF VOORWAARTS
Nadat de robots de signalen
"vooruit glijden" hebben
ontvangen, gaan ze vooruit.
Slide is ontvangen "vooruit"
signaal, zal deze actie continu
uitvoeren. Zorg voor een goede
samenwerking in de loop van
de voortgang.
10) DRAAI RECHTS
Na ontvangst van het signaal "rechts", schuift een robot naar rechts terug (motorrotatie voorwaarts,
linkervoetmotorrotatie). Zorg voor een goede samenwerking tijdens het
9) SCHUIF LINKS
Nadat u het "links"-signaal heeft ontvangen, draait u de robot naar links (de motor begint achteruit
te draaien, de linkervoetmotor draait naar voren). Zorg voor een goede samenwerking tijdens het
rotatieproces.
rotatieproces
een machinetaal
6)
Na ontvangst van het "rechts"-signaal moet
de robot naar rechts lopen en terugdraaien
(motorrotatie vooruit,
linkervoetmotorrotatie). Zorg voor een goede
samenwerking tijdens het rotatieproces.
J
J
Robots
II.
beginnen
Installeer vóór gebruik de batterijen 1. De
afstandsbediening heeft 2 sectie 7-batterijen
nodig (1,5 V AAA)
2. Gebruik "+" "aan de onderkant van de schroevendraaier
om de afstandsbediening te
openen. De schroef op het batterijdeksel
3. Plaats de batterij, de polariteit van de
batterijcellen moet correct zijn 4.
Installeer het batterijdeksel en draai de schroeven vast .
4) LOOP TERUG
Nadat de robots de signalen
"achteruit lopen" hebben
ontvangen, gaan ze
achteruit. Is het signaal "achteruit
lopen" ontvangen, zal deze actie
continu worden uitgevoerd.
Hebben een goede samenwerking
in het proces van terug.
Batterijen opladen: 1.
volgens de richting van de pijl batterijlader aangesloten op de wil. 2. de opladers, zoals
1) OPSTARTEN EN UITSCHAKELEN Nadat
het apparaat is ingeschakeld, gaat het automatisch naar de slaapstand.
Slaapmodus, druk op de schakelknop om op te starten, opstartstem, opstartstatus, druk op de
schakelknop om uit te schakelen, voltooi om uit te schakelen om te
USB-
stopcontacten voor huishoudelijk gebruik. 3. afhankelijk van de batterijcapaciteit
van de batterij, algemeen gedurende 2-3 uur, eerste gebruik: batterij opladen 3-4 uur. 4. Het
oplaadpunt moet de oplader loskoppelen, de
nieuwe batterij moet worden opgeladen na het opladen, de batterij en de oplader zullen, als het
gebruik van de hand de lichte koorts aanraakt, tot het normale behoort,
maak je geen zorgen.
oplaadlijn
slapen.
Robot opladen
Uitleg batterij
FZ Functionele
3) VOORUIT LOPEN
Nadat de robots het "loop"-signaal hebben ontvangen, gaan ze vooruit. Heeft een "loop"-
signaal ontvangen, zal deze actie continu uitvoeren. Zorg voor een goede samenwerking
in de loop van de voortgang.
specificaties
afstandsbediening
f/ Batterijkwesties die aandacht vereisen
I) raad aan
om alkalibatterijen te gebruiken. 2) kan oplaadbare batterijen gebruiken. 3) De batterij wordt niet
opgeladen. De batterij kan niet worden opgeladen. 4) de batterij mag niet kortsluiten, kapot gaan of in
brand vliegen. 5) Oplaadbare batterijen kunnen alleen onder toezicht van een volwassene
worden opgeladen. 6) Oplaadbare batterijen moeten vóór het opladen uit het speelgoed
worden verwijderd. 7) moet in de juiste polariteit in de batterij zitten. 8) van de verschillende soorten
batterijen of oude en nieuwe batterij kunnen niet worden gebruikt. 9) Hetzelfde of een soortgelijk type
batterij kan worden gebruikt. 10) leeg is, moet de batterij uit het speelgoed worden verwijderd.
MULTIFUNCTIONELE
2) STANDBY
Opstartstatus, en zonder stem en beweging, wordt de timing gedurende 20 seconden zonder
standby-prompt weergegeven.
Er zijn nog 3 andere promptstemmen, die achtereenvolgens één voor één worden afgespeeld.
Nog steeds geen bediening van de timing van ongeveer 120 seconden, en dan in slaap vallen
na de toespraak.
Taal afsluiten
ROBOTINSTRUCTIE
I rätt riktning för att sätta i USB-laddaren, sätt i USB-laddaren
1 -2 v eluttag för att ladda, laddningsindikator.
<
Ljudutgång PWM sätt
ett
— ett maskinspråk
maskinspråk
7) SLID FRAMÅT Efter att ha
mottagit signalerna "glid framåt" ska
robotar gå framåt. Bilden har tagits emot
"framåt"-signal, kommer kontinuerligt
att utföra denna åtgärd. Ha ett gott
samarbete under framsteg.
17)
14) STOPP
Efter att ha tagit emot "stopp"-signalen, om det är under vilka omständigheter är omedelbart
stoppa den aktuella funktionen, gå in i standby-läge.
vetenskap............
........ --MIDI-musiken
Tre perioder för att demonstrera rörelser, varje
13) volym + volym (grad sju) standardvolym på nivå 5 A. efter mottagande av
"volym +"-signalen, ljud mer volym, samtidigt en röstprompt, när rösten nått maximalt, och sedan
finns det ingen prompt Volym - volym (grad sju) standardvolym på nivå 5) Ljud, efter mottagande
av "volym -"-signalen för att minska volymen, samtidigt en röstuppmaning, när ljudet når
timmen, och sedan, ingen
Efter att ha gått in i tillståndet för programmering, kan vara godtycklig programmering för alla
startknappen funktion, kan trycka på 15 mest programmering. Efter avslutad programmering
för att ta emot "programmerings"-signaler, robot som är enligt programmeringen för att spela
upp dem en efter
tidsperiod.
en.
uppmaning.
18)
Efter presentationen
Engelska...............
19) MIDI-musiken
12) LÄGESVÄTTA (GÅNGHASTIGHET)
Tryck på läge 2-knappen, omkopplaren går framåt, går bakåt, sväng vänster och gå till fots
höger om snabb åtgärd, avtryckarens verkan är tillbaka till det normala igen.
8) GLID BAKÅT
Efter att ha mottagit signalen
"glid tillbaka" rör sig roboten bakåt.
Har mottagits taxi tillbaka" signal, kommer att kontinuerligt utföra denna åtgärd. I processen för
Efter att ha kontrollerat MINIUSB-laddningsgränssnittet, infogning, indikator,
20) sjunga en sång
junior har ljudeffekter att samarbeta.
-
robotavstängning,
fungerar inte, kan inte trycka på strömknappen. Måste läggas åt sidan efter laddledningen för att
fungera enligt strömknappen igen. Bara inte ladda tillstånd för att starta.
Arbeta inte för laddningsstatus.
Standbytid i 30 dagar, laddning 2 timmar, elanvändningen 3 timmar, 3-5 meters fjärrkontrollavstånd.
Statiskt tillstånd efter 30 sekunder för sig själv, en gång var 10:e sekund för sig själv, tills sömn,
sova efter 150
15) PROGRAMMERING
Efter mottagande av "programmerings"-signaler, robotprogrammering eller
programmeringsuppspelning.
sekunder.
5) SVÄNG VÄNSTER
Efter att ha mottagit signalen "vänster"
svänger roboten åt vänster (motorn börjar rotera
bakåt, motorn med vänster fot roterar framåt). Ha
ett gott samarbete i rotationsprocessen.
10)SVÄNG HÖGER
Efter att ha mottagit "höger" signalen, glider en robot till höger sväng tillbaka (motorrotation
framåt, vänster fotmotorrotation). Ha ett gott samarbete i
ett
16) DEMONSTRATIONSFUNKTION FÖR TRE DANS Efter att ha tagit emot
signalen "demonstrationsfunktion" och sedan utföra demonstrationsfunktionen.
maskinspråk
rotationsprocessen
6)
Efter att ha mottagit den "rätta" signalen,
ska roboten gå höger sväng tillbaka
(motorrotation framåt,
vänsterfotsmotorrotation). Ha ett gott
samarbete i rotationsprocessen.
11) LÄGE (HASTIGHET MED SLIDSWITCH)
Trycker på knappen, mönster 1-omkopplaren är jämn, jämn bakåt, snabb mjuk sväng åt vänster
och höger för åtgärd, åtgärden på avtryckarkontakten är tillbaka till det normala
9) SLID VÄNSTER
Efter att ha mottagit "vänster"-signalen, skjut robotsvängen åt vänster (motorn börjar rotera
bakåt, vänster fots motor roterar framåt). Ha ett gott samarbete i rotationsprocessen.
igen.
J
J
Robotar
II.
startar
2) STANDBY
Startläge, och utan röst och rörelse, kommer timing i 20 sekunder utan driftsstandby-prompt att visas.
4) GÅ TILLBAKA Efter
att ha mottagit signalerna "gå bakåt"
rör sig robotar tillbaka. Har mottagits "gå
bakåt" signal, kommer kontinuerligt
att utföra denna åtgärd. Ha ett gott
samarbete i processen tillbaka.
Batterier Laddning:
1 .enligt pilens riktning batteriladdare ansluten med viljan. 2. laddarens insatser, t.ex.
1) UPPSTART OCH AVSTÄNGNING Efter
att strömmen slagits på går du automatiskt in i viloläge.
Viloläge, tryck på strömbrytarknappen för att starta, starta röst, startläge, tryck på växlingsknappen
för att stänga av, avsluta för att stänga av för att
USB-
hushållsuttag. 3. beroende på batteriets batterikapacitet, allmänt i 2-3 timmar, första
användning: batteriladdning 3-4 timmar. 4. laddningsuttaget bör koppla ur laddaren, den nya
batteriladdningen, måste användas efter vid
laddning, batteri och laddare kommer, om användning hand röra lätt feber, hör till det normala,
oroa dig inte.
laddningslinje
vila.
Robotladdning
Fjärrkontroll batteri förklaring
Före användning, installera batterier 1.
Fjärrkontrollen behöver 2 sektion 7 batteri (1,5
V AAA)
2. Använd "+" "längst ner på skruvmejseln för att öppna
fjärrkontrollen. Skruven på
batteriluckan 3. Sätt i batteriet,
battericellens polaritet ska vara korrekt 4. Montera
batterilocket och skruva fast
FZ
3) GÅ FRAMÅT Efter att ha
mottagit "gå"-signalen ska robotar gå framåt. Har fått en "gå"-signal, kommer kontinuerligt att
utföra denna åtgärd. Ha ett gott samarbete under framsteg.
Funktionsspecifikationer
skruvarna .
f/ Batterifrågor som behöver åtgärdas I)
rekommenderar att du använder alkaliska batterier. 2) kan använda
uppladdningsbara batterier. 3) att inte ladda batteriet kan inte laddas. 4) batteriet inte
kortsluter, går sönder eller går in i elden. 5) laddningsbara batterier kan endast
laddas under uppsikt av vuxen. 6) laddningsbara batterier bör tas bort från
leksaken innan laddning. 7) bör ha rätt polaritet i batteriet. 8) av de olika typerna av
batterier eller gamla och nya batterier kan inte användas. 9) samma eller liknande typ
av batteri kan användas. 10) tar slut, slut på batteri bör tas bort från leksaken.
II) om den inte ska användas under en längre tid, ta ut batteriet i leksaken. 12) strömuttaget får inte kortslutas. 13)
använd inte i starkt solljus, för
att inte påverka användningseffekten.
Det finns 3 andra prompt röster, sekventiellt spela en i taget.
Fortfarande ingen operation av timing cirka 120 sekunder, sedan spela i vila efter talet.
MULTIFUNKTIONELL
Avstängningsspråk
ROBOTINSTRUKTION





