
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
1
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
修订履历 Document modification record
修订日期
Revision date
版本
Versions
修订内容
Revision content
修订人
Revised by
2025/7/22
1.0
新增项目
陈嘉圣
部门
Established
Dept.
制订
Prepared by
审核
Checked by
批准
Approved by
发布部门
Release Dept.
实施日期
Implemented
Date
技术中心
研发中心
会签栏
接收部门
Received Dept
☐销售部
□
运维部
□
工程部
□
技术部
□
产品部
□
制造部
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
2
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
□质量部 □采购部 □综合管理部 □智能研发部
本说明是太阳能清洁机器人的一般指南。、
This manual serves as a general guide for the solar-powered cleaning robot.
安装前,请根据我们在相关包装中提供的零件清单检查所有组件是否准备就绪。
Before installation, please verify all components are ready by checking against the parts
list provided in the relevant packaging.
第 1 部分:机器人装配
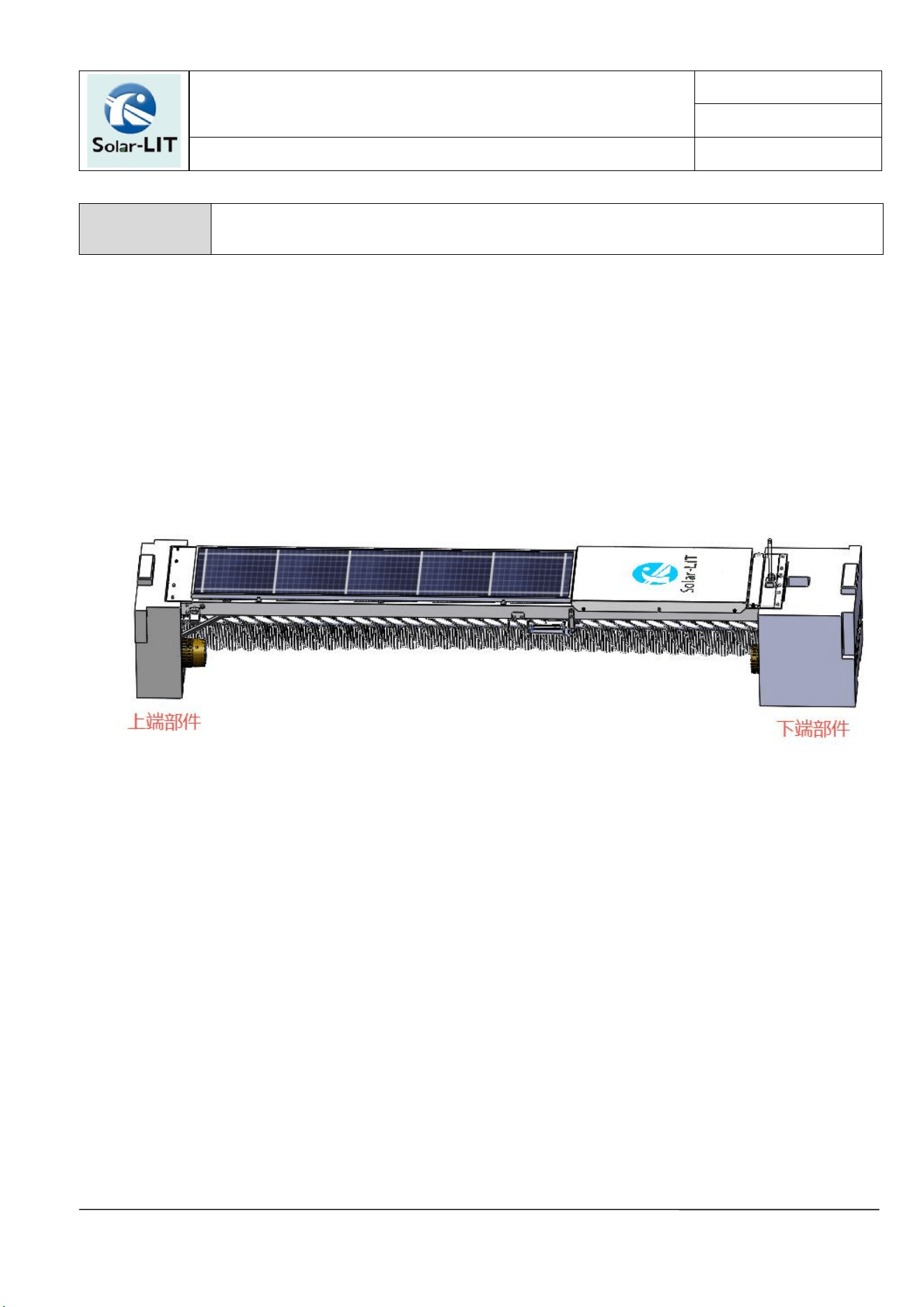
1. 机器人整机基本安装完成,出货运送到现场需要安装挂轮和挂钩;
The primary phase of the robot's assembly has been completed. Installation of the
suspension wheels and hooks shall be conducted following shipment to the facility.
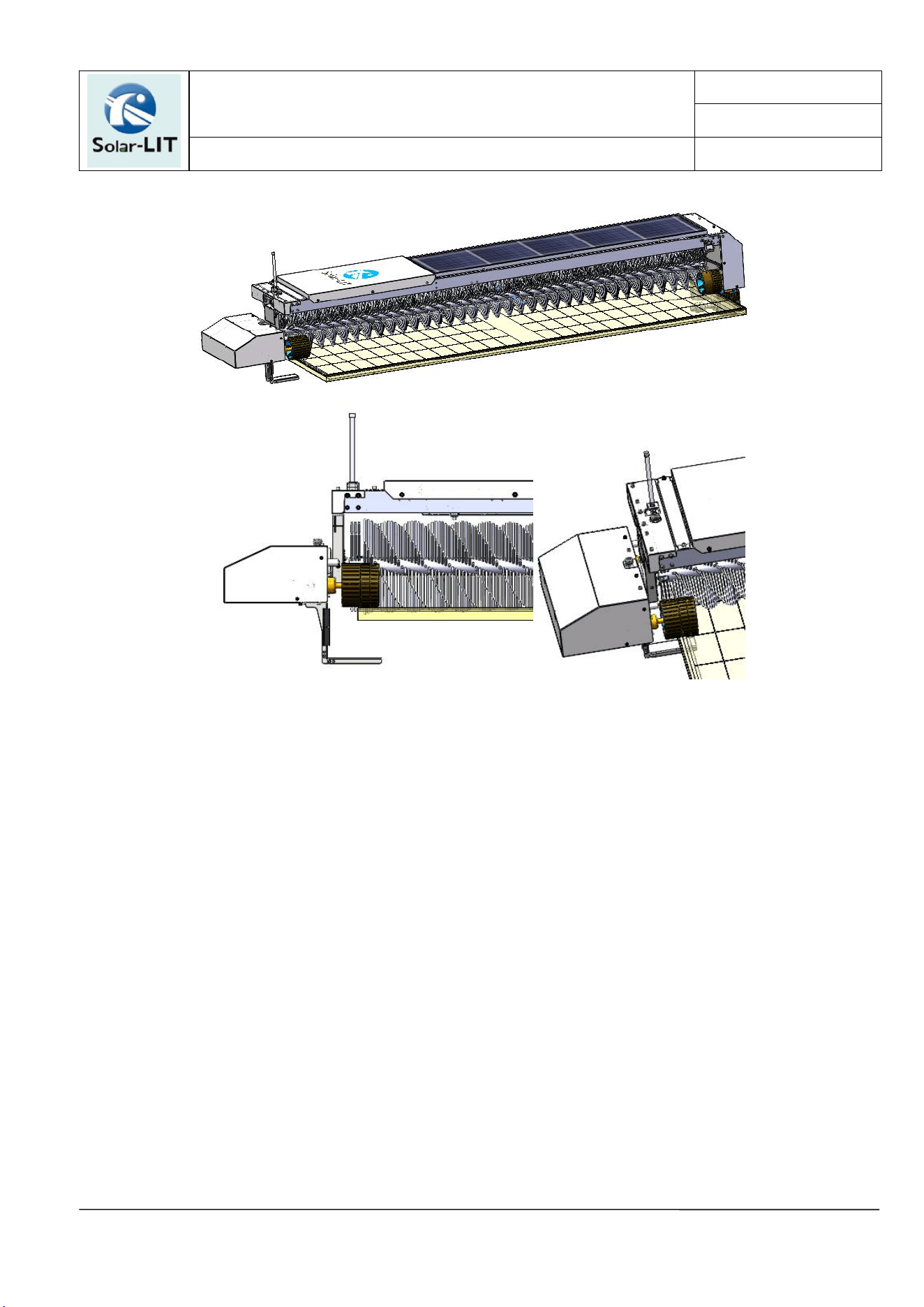
2. 拆除包装,上端部件安装挂轮和上挂钩:
De-pack the system and affix the hanging wheels along with the upper suspension hook
to the designated upper module.
Step 1: 安装行走轮和尼龙挂轮,使用内六角圆柱头螺钉(M6×30)和防松螺母(M6)锁紧挂轮;
Step 1: Install the Walking Wheel and Hunging Wheel. Secure the hanging wheels using socket
head cap screws (M6×30) and lock nuts (M6).
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
3
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
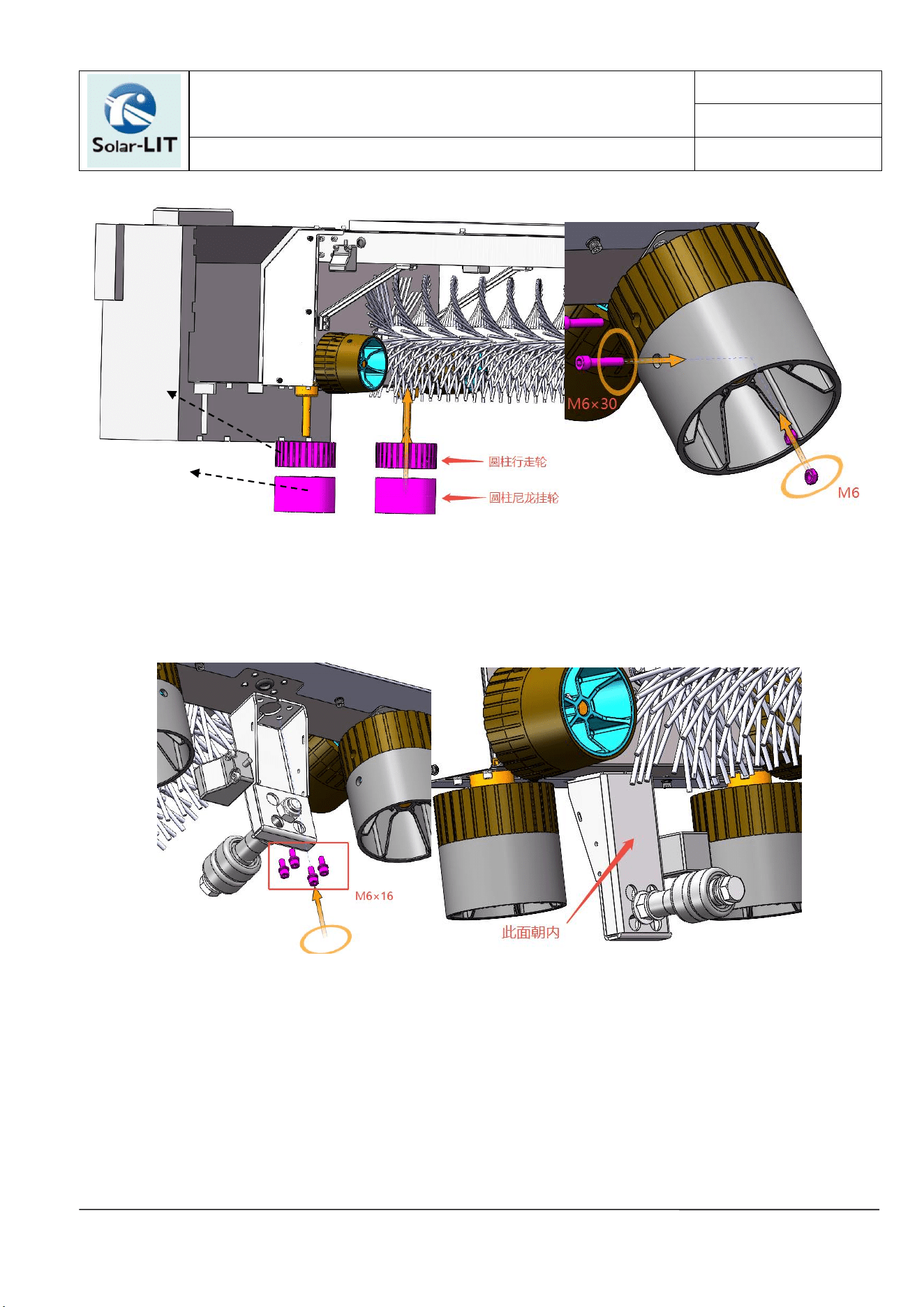
Step 2: 确认挂钩状态,安装上防脱挂钩,使用内六角圆柱头组合螺钉(M6×16)锁紧,安装过程
注意挂钩朝向;
Step 2: Inspect the hook assembly status, then proceed with the installation of the
anti-disengagement hook unit. Secure the assembly using hex socket head combination screws
(M6×16), ensuring proper orientation of the hook during the installation process.
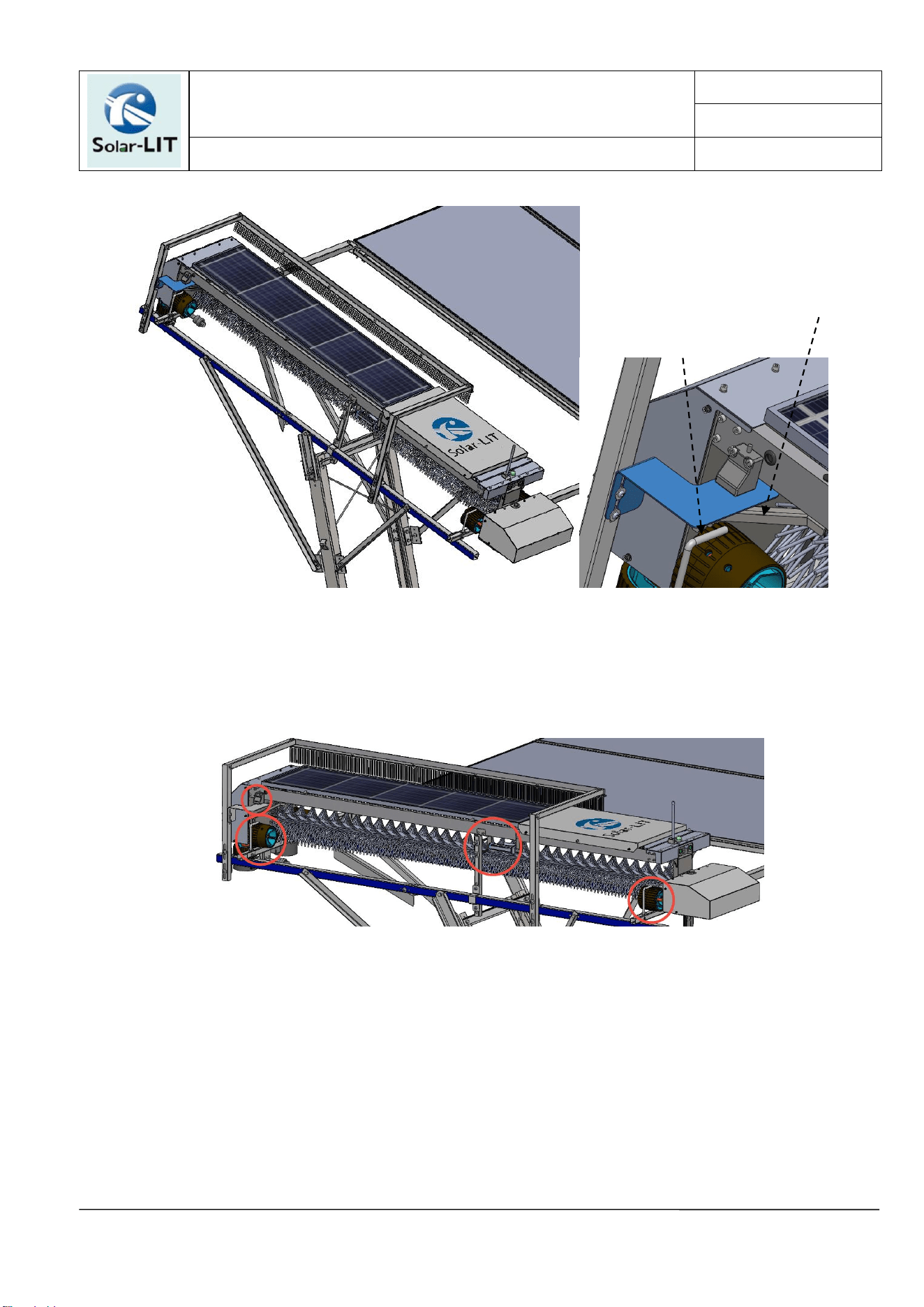
Step 3: 接近开关延长线由端板内侧经过线防尘密封圈引出,在外侧和风载接近开关对接,对接后
使用扎带将线固定在挂钩绑线孔上;
Step 3: Route the proximity switch extension cable through the dust-proof sealing ring
on the end plate's interior side. Connect it to the wind-load proximity switch on the
exterior side, then secure the cable to the hook's wire-binding orifice using cable ties
after connection.
行走轮
Walking Wheel
挂轮
Hunging Wheel
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
4
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
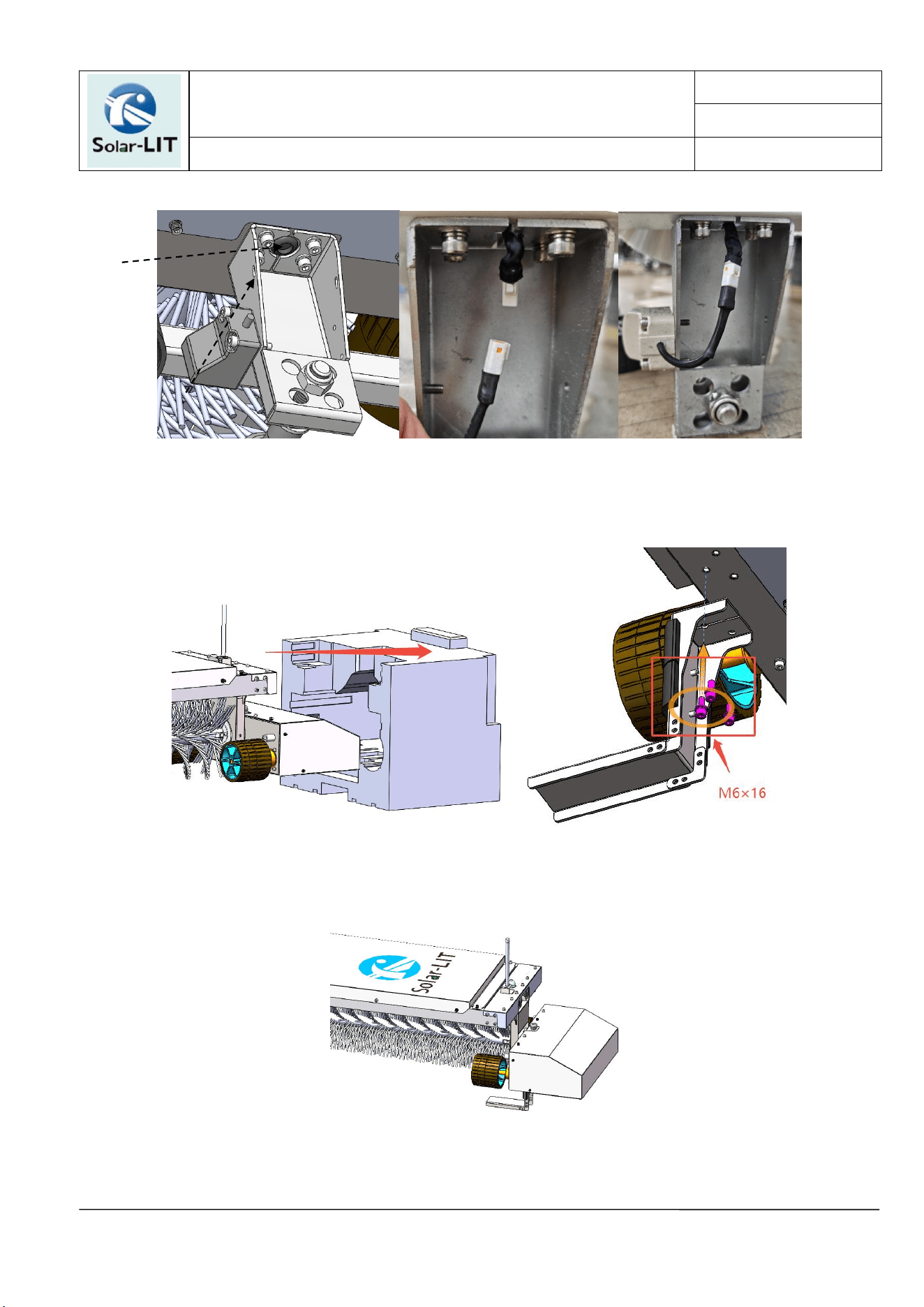
3. 拆除包装,下端部件安装挂钩,使用内六角圆柱头组合螺钉(M6×16)锁紧;
Step 3: Remove the packaging, install the hook on the lower assembly, and secure it with
hex socket head combination screws (M6×16).
4. 拧上天线,螺纹拧紧。
Rotate the antenna clockwise until full thread engagement is achieved.
第 2 部分:将清洁机器人放在面板上
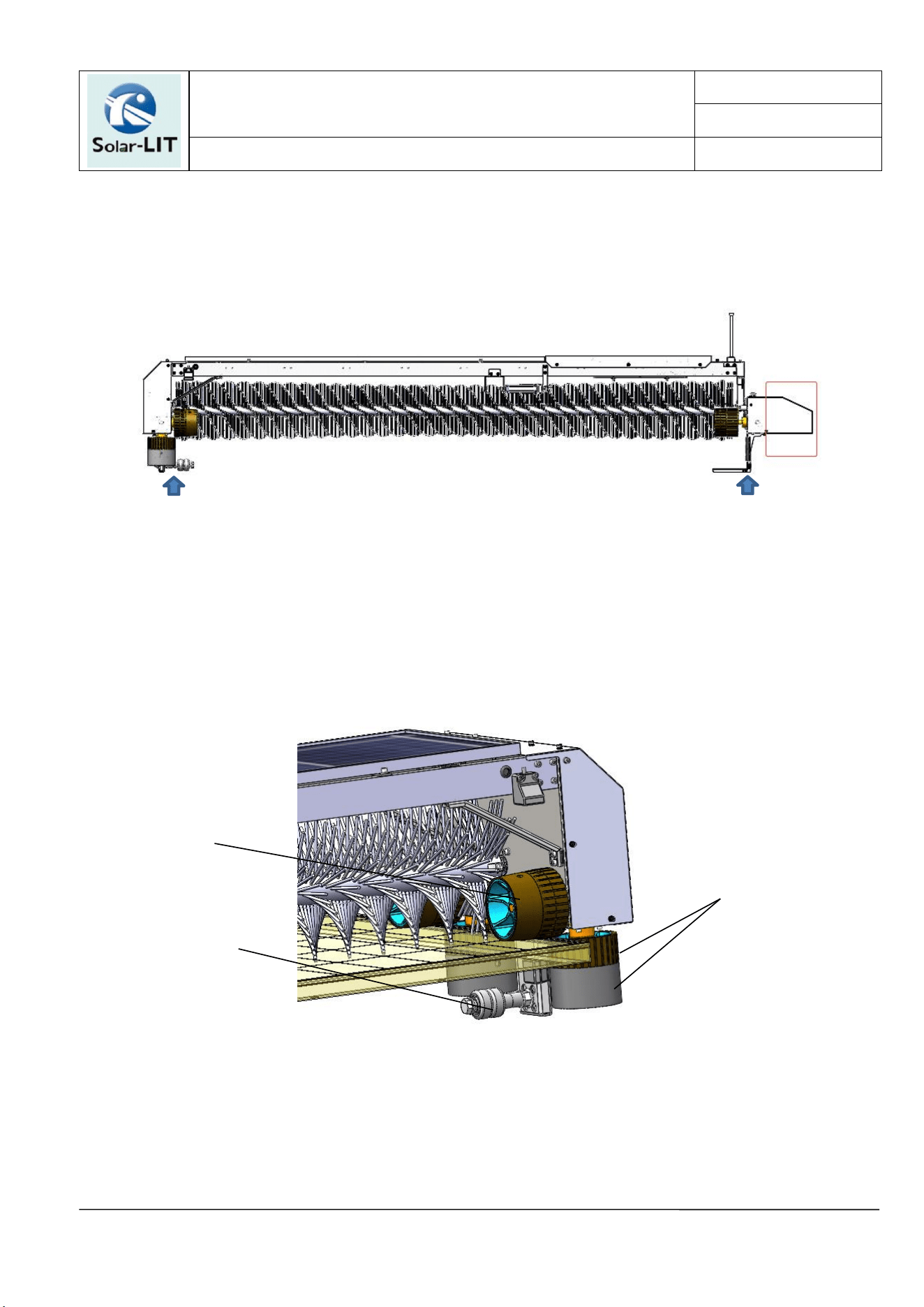
1. 现场需要两个人来帮忙搬运,下端外罩无法受力(红色方框),注意避让,人员分布受力点如
过线防尘密封圈
Cable pass dust seal
绑线孔
Cable tie mount
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
5
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
下:
1. On-site assistance from two personnel is required for transportation. The lower cover
is non-load-bearing (as indicated by the red box) and must be avoided. Personnel should
distribute force exclusively at the designated load-bearing points illustrated below.
2. 小心抬起机器人,将上端挂轮扣在面板侧边缘上,确保挂轮和上端行走轮紧密接触面板金属边
框,防脱挂钩位于面板下方。
2. Carefully lift the robot and engage the upper hanging wheels onto the side edge of
the panel. Ensure both the hanging wheels and the upper travel wheels maintain full contact
with the metal frame of the panel, with the anti-disengagement hook positioned beneath
the panel.
3. 小心地缓慢下降机器人的下部,直到下行走轮接触到下端面板边缘金属边框。
3. Carefully and slowly lower the lower section of the robot until the lower travel wheels
make full contact with the metal frame on the bottom panel edge.
Support
Support
(侧视图)
行走轮
Walking Wheel
防脱挂钩
Anti-drop hook
挂轮
Hunging Wheel
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
6
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
注意:请记住,操作时必须非常小心,以防光伏组件或机器人受损。
Important: Exercise extreme caution during operation to prevent damage to photovoltaic
modules or the robot system.
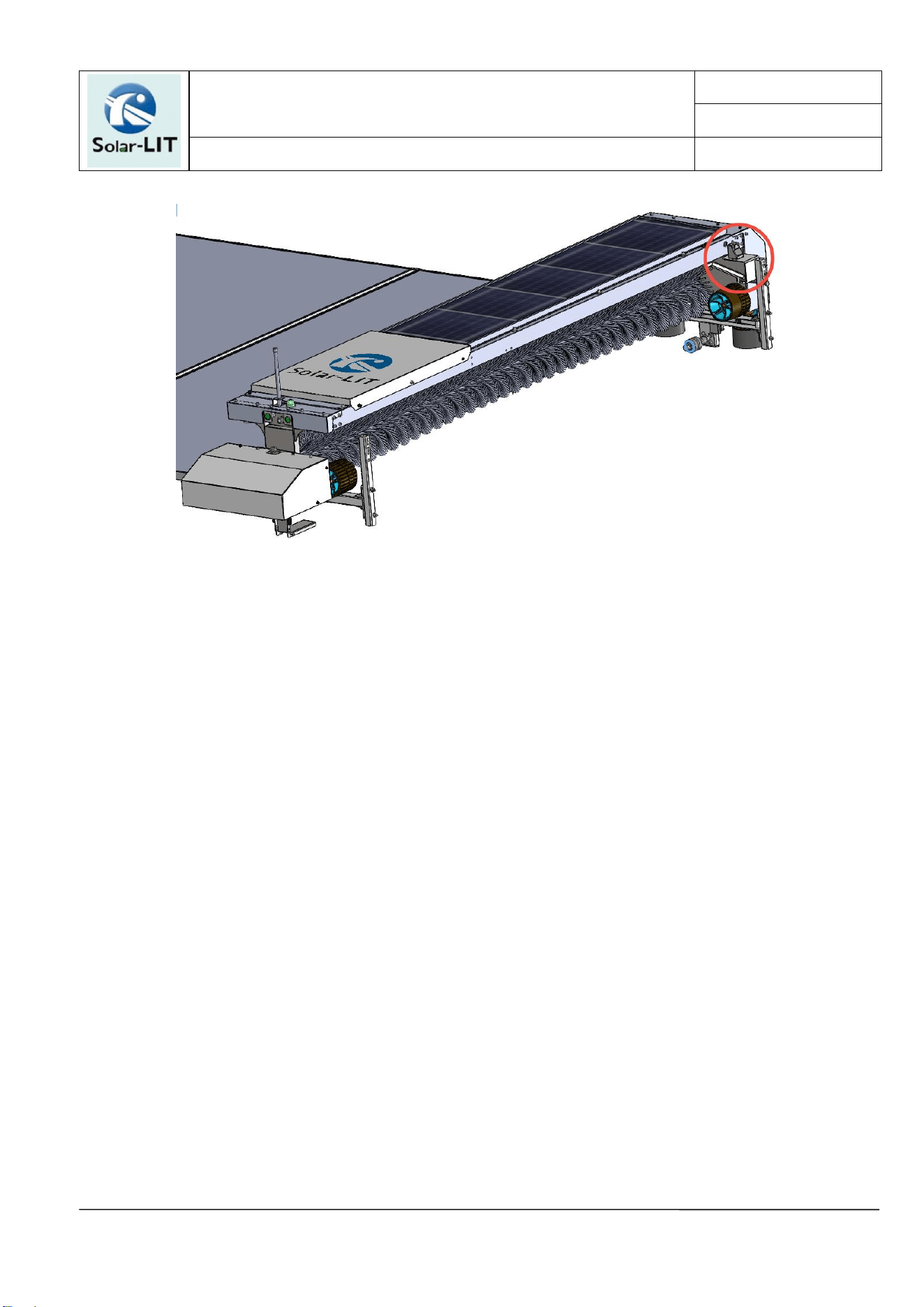
3. 停机位接近开关对位:确保停机位接近开关与停机位感应片基本对中,且两者竖向间距保持在
5~15mm。
4. Parking Position Proximity Switch Alignment:Ensure the parking position proximity
switch is roughly centered with the induction plate, maintaining a vertical clearance
of 5-15mm between them.
4.
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
7
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
5. 停机位上轮挡杆、防风支架、感应片三者对位:确保机器人轮子顶住挡杆的时候,推杆可以顺
畅的推入防风支架,同时接近开关处于感应片上方不能脱离。
5. Alignment of Parking Position Components (Wheel Stopper, Windproof Bracket & Sensor
Plate),Ensure when the robot wheels contact the stopper bar:
The push rod can smoothly engage the windproof bracket
The proximity switch remains positioned above the sensor plate without disengagement
6. 返机位接近开关对位:确保停机位接近开关与停机位感应片基本对中,且两者竖向间距保持在
5~15mm。与第 4 步骤一致。
6. Return Position Proximity Switch Alignment
Ensure the return position proximity switch is concentrically aligned with the induction
plate, maintaining a vertical clearance of 5-15mm between components. ( Note: Same
technical requirements as Step 4)
停机位接近开关
停机位感应片
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
8
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
第 3 部分:试跑前的检查
Part 3: Pre-Run Inspection (Robot in Parking Position)
1. 按下电源开关,机器人指示灯亮红灯自检,自检通过后机器人绿灯常亮,此时机器人状态正常
可运行。
1. Power-On Self-Test
Press the power button to activate the robot
Self-test sequence:
Red LED = System initializing (duration: ≤30 sec)
Green LED (steady) = Self-test passed / Operational ready
2. 检查接近开关与感应片相对位置是否正确。
2. Proximity Switch Alignment Verification
Required alignment:
• Sensor-to-target gap: 5-15mm (optimal: 10mm)
3. 在正确位置接近开关指示灯常亮。
3. Sensor Status Confirmation

PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
9
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
左侧接近开关(常亮) 右侧接近开关(常亮)
第 4 部分:启动和停止机器人
物理操作:按启动电源,等待 2~3 秒机器人即可运行。
Physical Operation (Manual Control)
Steps:
Press the power button (hold for 1 second).
Wait 2-3 seconds for system self-check (solid green light indicates readiness).
The robot will enter standby mode and is ready for tasks.
手机 APP 操作:
Mobile App Operation:
1. 打开控制 APP 扫描机器人下端部的 SN 二维码,进行蓝牙连接。
1.Open the control APP and scan the SN QR code located at the lower part of the robot to
establish Bluetooth connection.
机器人指示灯
Robot Indicator Light
电源开关
Power Switch
启动开关
Start Switch
Left-side proximity switch
(normally illuminated)
Right-side proximity switch
(normally illuminated)
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
10
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
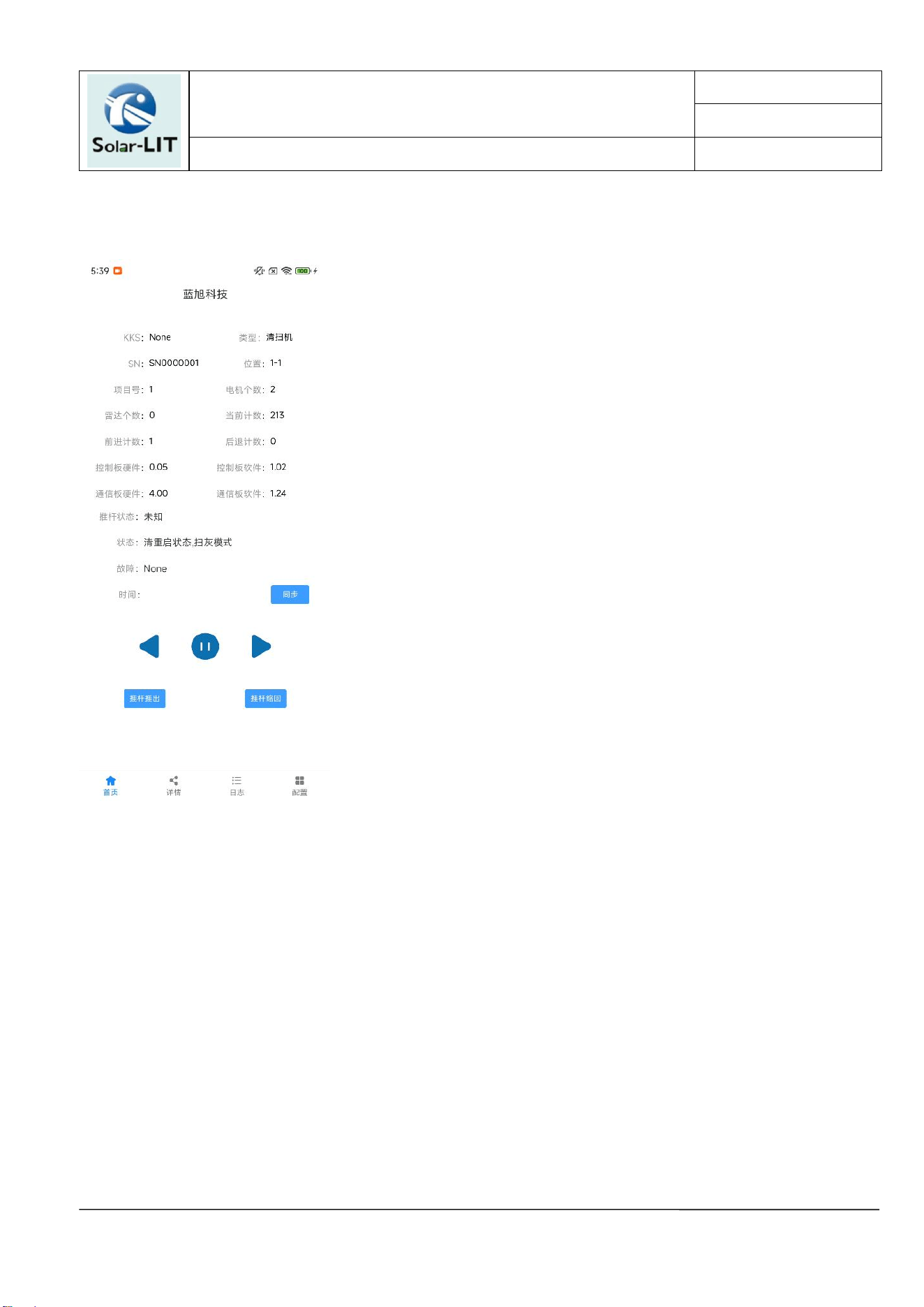
2. APP 首页即有控制按钮可直接进行控制。
2.The APP homepage provides direct control buttons for immediate operation.
第 5 部分:机器人运行逻辑
1. 每天定时自动从停机位出发到返机位返回,来回清扫一趟。清扫时间可在上位机上设定。
1.Autonomous operation:
•Daily scheduled launch from parking position (left side)
•Predefined route: Parking position → Return position (right side) → Parking position
•Cleaning parameters:
Start time programmable via HMI (00:00-23:59)
2. 若机器人停在组件上,按启动键机器人自动返回停机位。

PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
11
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
2. Emergency Return Protocol (Component Parking Scenario)
Operation Logic:When robot is stationary on PV modules.
FCC Statement:
This device complies with part 15 of the FCC Rules. Operation is subject to the following
two conditions: (1) This device may not cause harmful interference, and (2) this device
must accept any interference received, including interference that may cause undesired
operation.
This equipment has been tested and found to comply with the limits for a Class B digital
device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable
protection against harmful interference in a residential installation. This
Equipment generates,uses and can radiate radio frequency energy and,if not installed and
used in accordance with the instructions,may cause harmful interference to radio
communications.However,there is no guarantee that interference will not occur in a
Particular installation.If thise quipment does cause harmful interference to radio or
television reception, which can be determined by turning the equipment off and on, the
user is encouraged to try to correct the interference by one or more of the following
measures:
—Reorient or relocate the receiving antenna.
—Increase the separation between the equipment and receiver.
—Connect the equipment into an outlet on a circuit different from that to which the receiver
is connected.
—Consult the dealer or an experienced radio/TV technician for help.
Caution: Any changes or modifications not expressly approved by the party responsible for
compliance could void the user's authority to operate the equipment.
This equipment complies with FCC radiation exposure limits set forth for an uncontrolled
environment. This transmitter must not be co-located or operating in conjunction with any
other antenna or transmitter.
PSA24317-NT PIF4-Muwayh PV2.35GW 项目清扫机
器人安装说明
版本 Versions: 1.0
日期 Date: 2025/7/22
Page
12
/ of
12
内容仅经许可后才能传递、使用或透露。蓝旭科技保留所有权利。
The contents may only be passed on, used or made known with our express permission. © Solar-LIT - All rights reserved.
This equipment should be installed and operated with minimum distance 20cm between the
radiator&your body.
制定
日期
2025-08-05
审核
日期
2025-08-05
批准
日期
2025-08-06
受控
日期
2025-08-07






