Loading ...
Loading ...
Loading ...
PT
100
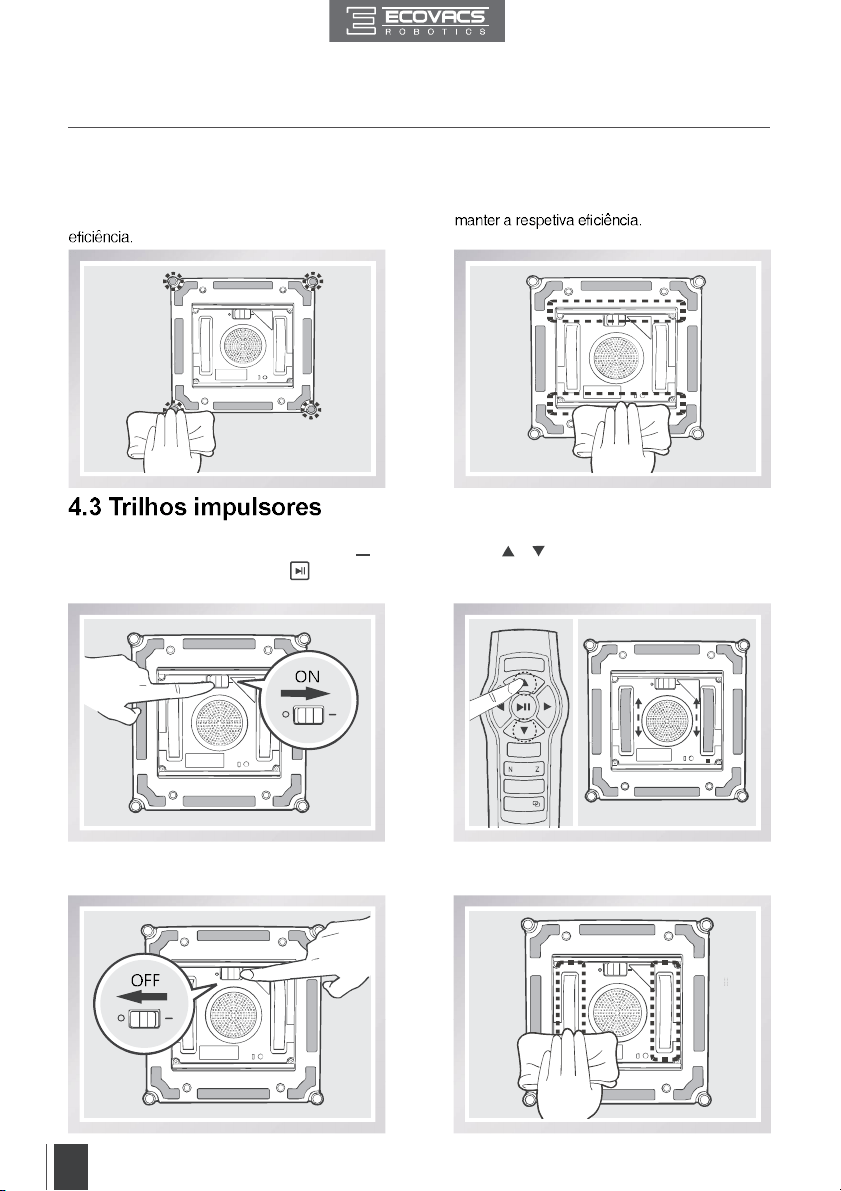
4. Manutenção
Sensores de deteção da extremidade Rodos
Vire o WINBOT 8 ao contrário e limpe os quatro
sensores de deteção da extremidade com o pano
de acabamento fornecido para manter a respetiva
Vire o WINBOT 8 ao contrário e limpe os dois
rodos com o pano de acabamento fornecido para
Vire o WINBOT 8 ao contrário e coloque o
interruptor de alimentação na posição " ".
Prima continuamente o botão durante 5
segundos para parar a ventoinha.
Inspecione os trilhos impulsores, utilizando os
botões e no controlo remoto. Pare os trilhos
impulsores se vir sujidade nos trilhos.
Coloque o interruptor de alimentação na
posição "O".
Limpe a eventual sujidade presente nos trilhos
impulsores com o pano de acabamento fornecido.
Loading ...
Loading ...
Loading ...