
Beogram 4000c
Technical Sound Guide
Bang & Olufsen A/S
This manual is for information purposes only and is not legally binding.
May 23, 2022
Contents
1 History 4
1.1 The mechanical phonograph . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Magnets and Coils . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 The physics 5
2.1 Amplitude vs. Velocity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Surface noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Mono to Stereo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 The cartridge , stylus, and tonearm 8
3.1 MMC: Micro Moving Cross . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 Signal Levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 Tip shape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.4 Bonded vs. Nude . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.5 Tracking force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.6 Effective Tip Mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.7 Compliance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.8 Soundsmith SMMC20CL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.9 Tangential Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
4 Audio Specificat ions 17
4.0.1 Magnitude Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0.2 Rumble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0.3 Rotational speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0.3.1 Accuracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0.3.2 Stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.0.3.3 Measurement and Weighting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.0.3.4 Expressing the result . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
5 Reading the measurement datasheet 20
5.1 Measurements from Vinyl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.1.1 Magnitude Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.1.2 Channel Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1.3 Crosstalk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1.4 Rumble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1.5 Wow and Flutter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
5.1.6 Frequency Drift . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2 RIAA Preamplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2.1 Magnitude Response Deviation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2.2 Channel Matching . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
6 Beogram 40 0 0 c Specifications 24
7 Further Reading 25
2

3
History
1.1 The mechanical
phonograph
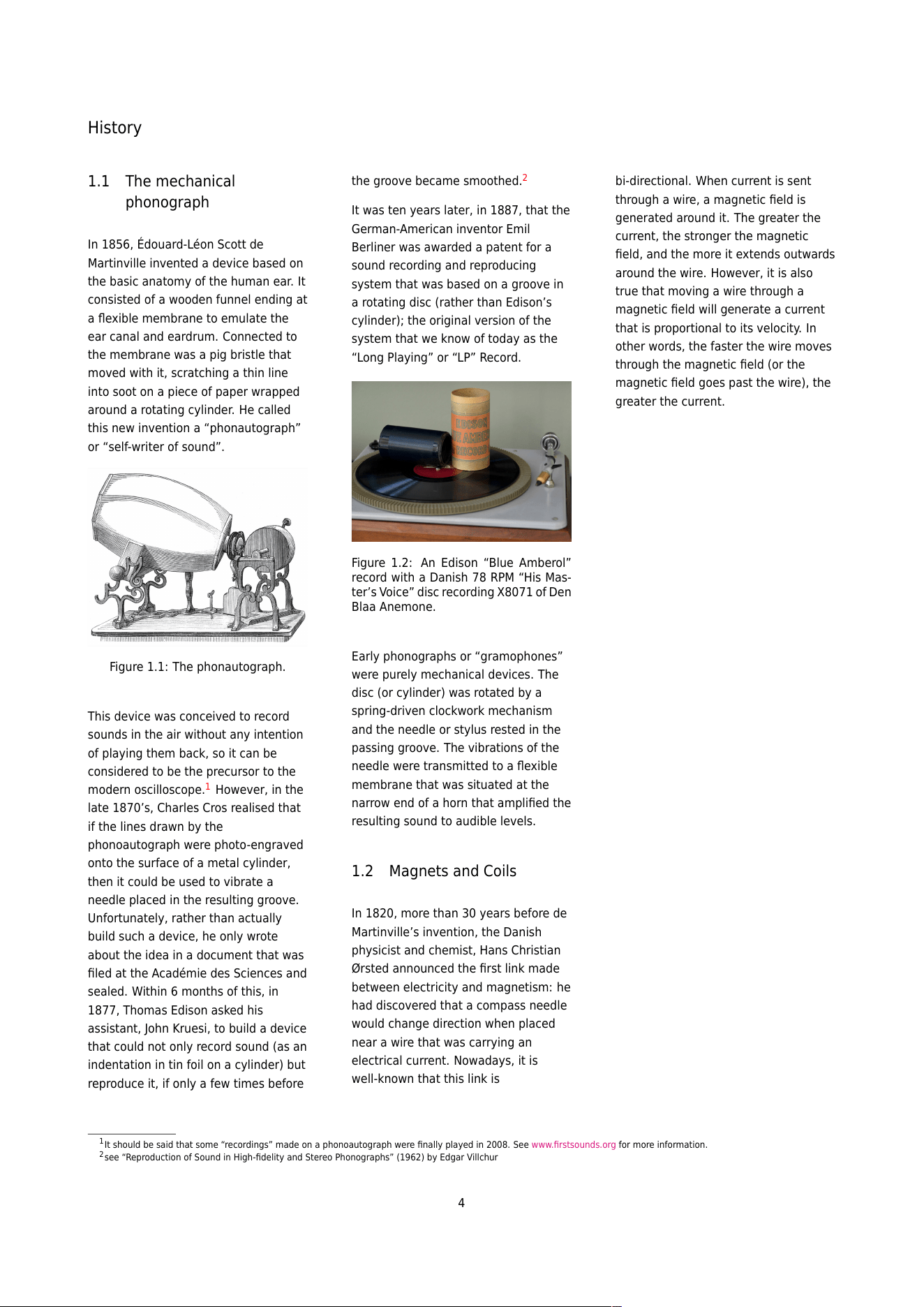
In 1856, Édouard-Léon Scott de
Martinville invented a device based on
the basic anatomy of the human ear. It
consisted of a wooden funnel ending at
a flexible membrane to emulate the
ear canal and eardrum. Connected to
the membrane was a pig bristle that
moved with it, scratching a thin line
into soot on a piece of paper wrapped
around a rotating cylinder. He called
this new invention a “phonautograph”
or “self-writer of sound”.
Figure 1.1: The phonautograph.
This device was conceived to record
sounds in the air without any intention
of playing them back, so it can be
considered to be the precursor to the
modern oscilloscope.
1
However, in the
late 1870’s, Charles Cros realised that
if the lines drawn by the
phonoautograph were photo-engraved
onto the surface of a metal cylinder,
then it could be used to vibrate a
needle placed in the resulting groove.
Unfortunately, rather than actually
build such a device, he only wrote
about the idea in a document that was
filed at the Académie des Sciences and
sealed. Within 6 months of this, in
1877, Thomas Edison asked his
assistant, John Kruesi, to build a device
that could not only record sound (as an
indentation in tin foil on a cylinder) but
reproduce it, if only a few times before
the groove became smoothed.
2
It was ten years later, in 1887, that the
German-American inventor Emil
Berliner was awarded a patent for a
sound recording and reproducing
system that was based on a groove in
a rotating disc (rather than Edison’s
cylinder); the original version of the
system that we know of today as the
“Lon g Playing” or “LP” Record.
Figure 1.2: An Edison “Blue Ambe rol”
record with a Danish 78 RPM “His Mas-
ter’s Voice” disc recording X8071 of Den
Blaa Anemone.
Early phonographs or “gramophones”
were purely mechanical devices. The
disc (or cylinder) was rotated by a
spring-driven clockwork mechanism
and the needle or stylus rested in the
passing groove. The vibratio ns of the
needle were transmitted to a flexible
membrane that was situated at the
narrow end of a horn that amplified the
resulting sound to audible levels.
1.2 Magnets and Coils
In 1820, more than 30 years before de
Martinville’s invention, the Danish
physicist and chemist, Hans Christian
Ørsted announced the first link made
between electricity and magnetism: he
had discovered that a compass needle
would change direction when placed
near a wire that was carrying an
electrical current. Nowadays, it is
well-known that this link is
bi-directional. When cu rrent is sent
through a wire, a magnetic field is
generated around it. The greater the
current, the stronger the magnetic
field, and the more it extends outwards
around the wire. However, it is also
true that moving a wire through a
magnetic field will generate a current
that is proportional to its velocity. In
other words, the faster the wire moves
through the magnetic field (or the
magnetic field goes past the wire), the
greater the current.
1
It should be said that some “recordings” made on a phonoautograph were finally played in 2008. See www.firstsounds.org for more information.
2
see “Reproduction of Sound in High-fidelity and Stereo Phonographs” (1962) by Edgar Villchur
4
The physics
2.1 Amplitude vs. Velocity
It is this second interaction that is at
the heart of almost every modern
turntable. As the stylus (or “needle”
1
)
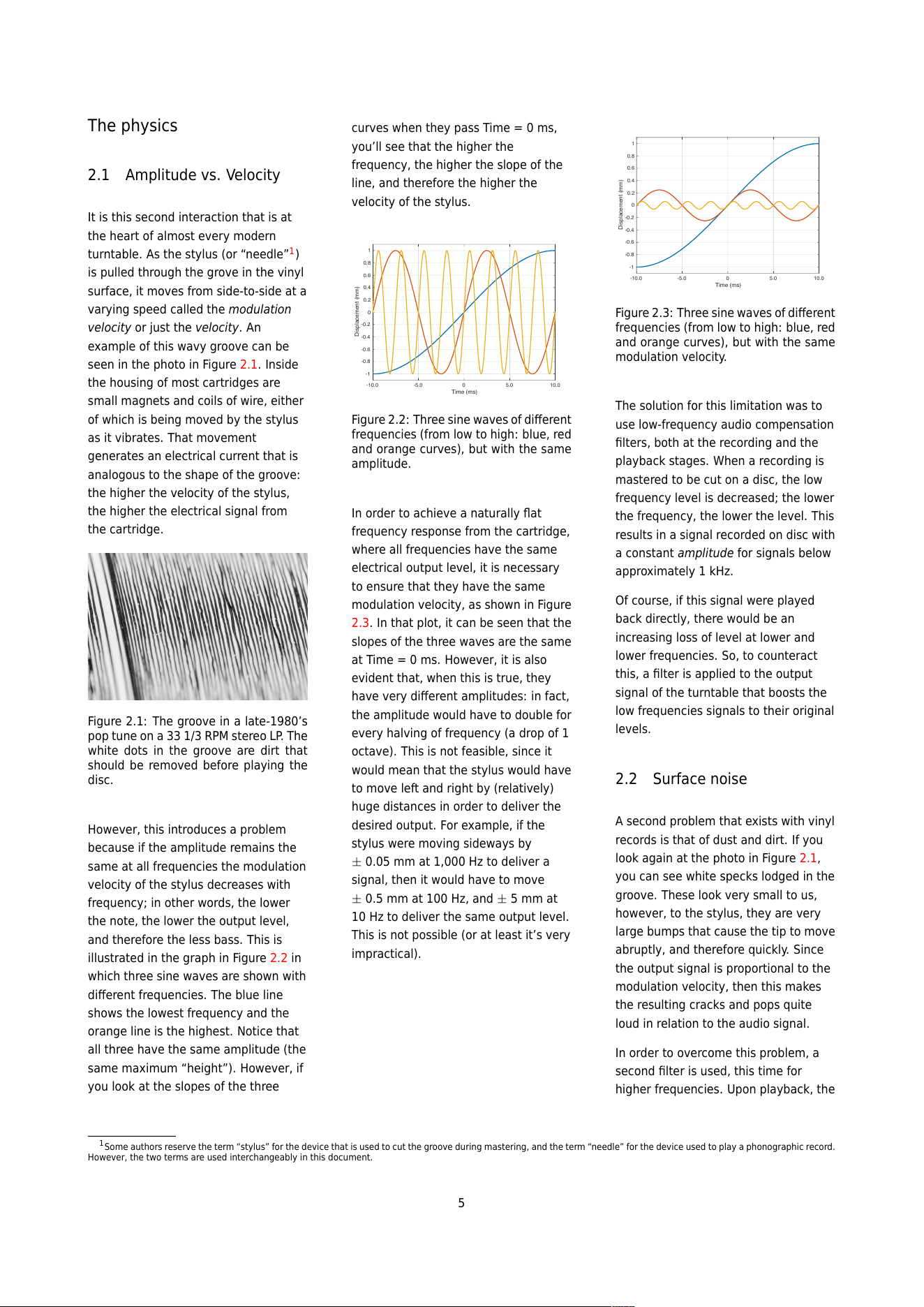
is pulled through the grove in the vinyl
surface, it moves from side-to-side at a
varying speed called the modulation
velocity or just the velocity. An
example of this wavy groove can be
seen in the photo in Figure 2.1. Inside
the housing of most cartridges are
small magnets and coils of wire, either
of which is being moved by the stylus
as it vibrates. That movement
generates an electrical current that is
analogous to the shape of the groove:
the higher the velocity of the stylus,
the higher the electrical signal from
the cartridge.
Figure 2.1 : The groove in a late-1980’s
pop tune on a 33 1/3 RPM stereo LP. The
white dots in the groove are dirt that
should be removed before playing the
disc.
However, this introduces a problem
because if the amplitude remains the
same at all frequencies the modulation
velocity of the stylus decreases with
frequency; in other words, the lower
the note, the lower the output level,
and therefore the less bass. This is
illustrated in the graph in Figure 2.2 in
which three sine waves are shown with
different frequencies. The blue line
shows the lowest frequency and the
orange line is the highest. Notice that
all three have the same amplitude (the
same maximum “height”). However, if
you look at the slopes of the three
curves when they pass Time = 0 ms,
you’ll see that the higher the
frequency, the higher the slope of the
line, and therefore the higher the
velocity of the stylus.
-10.0 -5.0 0 5.0 10.0
Time (ms)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Displacement (mm)
Figure 2.2: Three sine waves of different
frequencies (from low to high: blue, red
and orange curves), but with the same
amplitude.
In order to achieve a naturally flat
frequency response from the cartridge,
where all frequencies have the same
electrical output level, it is necessary
to ensure that they have the same
modulation velocity, as shown in Figure
2.3. In that p lot, it can be seen that the
slopes of the three waves are the same
at Time = 0 ms. However, it is also
evident that, when this is true, they
have very different amplitudes: in fact,
the amplit ude would have to double for
every halving of frequency (a drop of 1
octave). This is not feasible, since it
would mean that the stylus would have
to move left and right by (relatively)
huge distances in order to deliver the
desired output. For example, if the
stylus were moving sideways by
± 0.05 mm at 1,000 Hz to deliver a
signal, then it would have to move
± 0.5 mm at 100 Hz, and ± 5 mm at
10 Hz to deliver the same output level.
This is not possible (or at least it’s very
impractical).
-10.0 -5.0 0 5.0 10.0
Time (ms)
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Displacement (mm)
Figure 2.3: Three sine waves of different
frequencies (from low to high: blue, red
and orange curves), but with the same
modulation velocity.
The solution for this limitation was to
use low-frequency audio compensation
filters, both at the recording and the
playback stages. When a recording is
mastered to be cut on a disc, the low
frequency level is decreased; the lower
the frequency, the lower the level. This
results in a signal recorded on disc with
a constant amplitude for signals below
approximately 1 kHz.
Of course, if this signal were played
back directly, there would be an
increasing loss of level at lower and
lower frequencies. So, to counteract
this, a filter is applied to the output
signal of the turntable that boosts the
low frequencies signals to their original
levels.
2.2 Surface noise
A second problem that exists with vinyl
records is that of dust and dirt. If you
look again at the photo in Figure 2.1,
you can see white specks lodged in the
groove. These look very sm all to us,
however, to the stylus, they are very
large bumps that cause the tip to move
abruptly, and therefore quickly. Since
the output signal is proportional to the
modulation velocity, then this makes
the resulting cracks and pops quite
loud in relation to the audio signal.
In order to overcome this problem, a
second filter is used, this time for
higher frequencies. Upon playback, the
1
Some authors reserve the term “stylus” for the device that is used to cut the groove during mastering, and the term “needle” for the device used to play a phonographic record.
However, the two terms are used interchangeably in this document.
5
level of the treble is reduced; the
higher the frequency the lower the
output. This reduces the problem of
noise caused by surface dirt on the
disc, however it would also reduce the
high frequency content of the audio
signal itself. This is counteracted by
increasing the level of the
high-frequency portion of the audio
signal when it is mastered for the disc.
This general idea of lowering the level
of low-frequencies and/or boosting
highs when recording and doing the
opposite upon playback is a very old
idea in t he audio industry and has been
used on many formats ranging from
film “talkies” to early compact discs.
Unfortunately, however, different
recording companies and studios used
different filters on phonographs for
many years.
2
Finally, in the mid-1950s,
the Recording Industry Association of
America (the RIAA) sugge s te d a
standard filter description with the
intention that it would be used
world-wide for all PVC “vinyl” records.
Figures 2.4 and 2.5 show the responses
of the RIAA filters use d in both the
mastering and the playback of long
playing vinyl records. Although there
are other standards with slightly
different responses, the RIAA filter is
by far the most commonly-used.
Figure 2.4: The “pre-emphasis” filter to
be used in the mastering to disc, as
described by the RIAA standard. The
black line shows the simplified descrip-
tion, and the red curve shows the real-
world implementation.
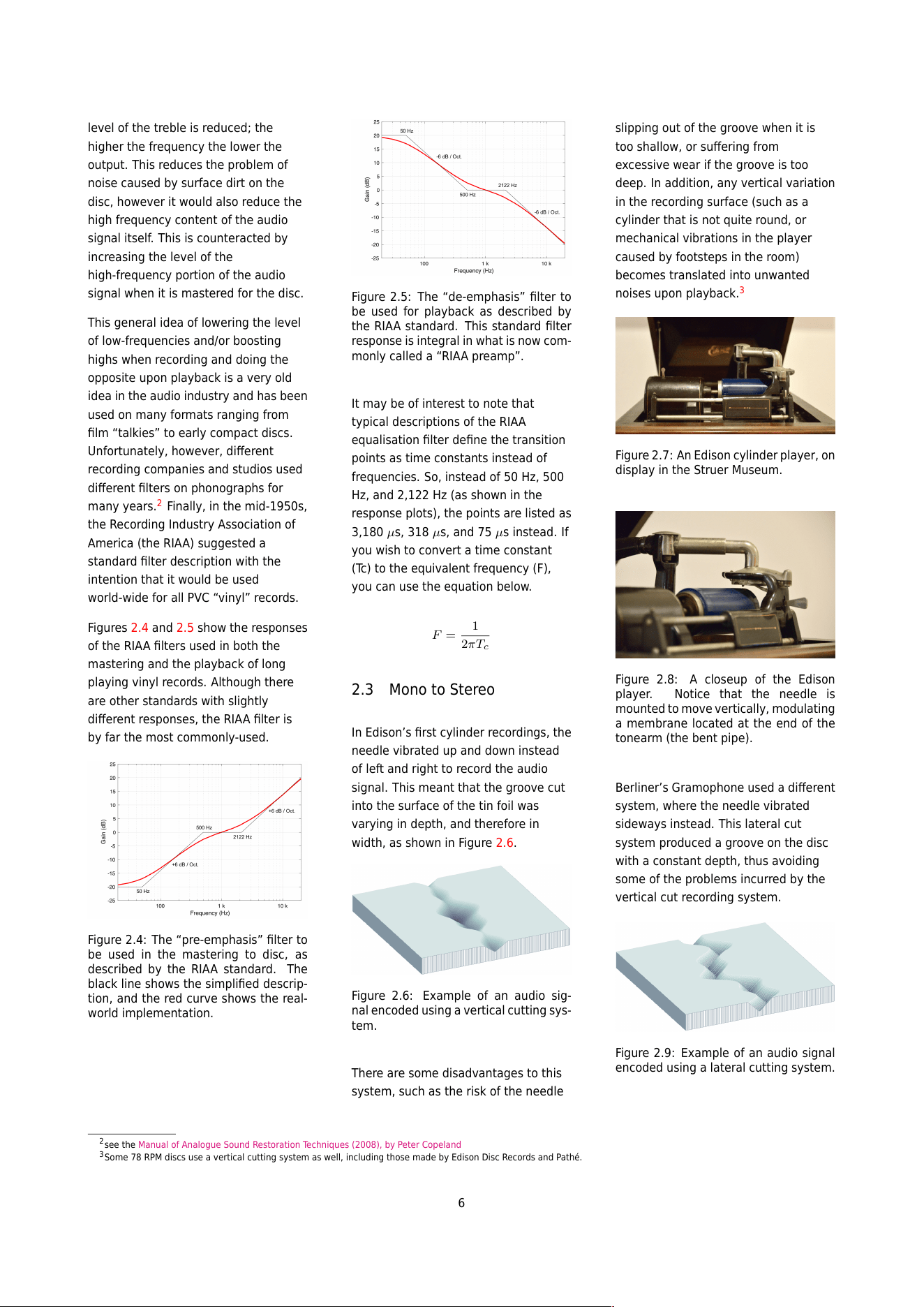
Figure 2.5: The “de-emphasis” filter to
be used for playback as described by
the RIAA standard. This standard filter
response is integr al in what is now com-
monly called a “RIAA preamp”.
It may be of interest to note that
typical descriptions of the RIAA
equalisation filter define the transition
points as time constants instead of
frequencies. So, ins te ad of 50 Hz, 500
Hz, and 2,122 Hz (as shown in the
response plots), the points are listed as
3,180 µs, 318 µs, and 75 µs instead. If
you wish to convert a time constant
(Tc) to the equivalent frequency (F),
you can use the equation below.
F =
1
2πT
c
2.3 Mono to Stereo
In Edison’s first cylinder recordings, the
needle vibrated up and down instead
of left and right to record the audio
signal. This meant that the groove cut
into the surface of the tin foil was
varying in depth, and therefore in
width, as shown in Figure 2.6.
Figure 2.6: Example of an audio sig-
nal encoded using a vertical cutting sys-
tem.
There are some disadvantages to this
system, such as the risk of the needle
slipping out of the groove when it is
too shallow, or suffering from
excessive wear if the groove is too
deep. In addition, any vertical variation
in the recording surface (such as a
cylinder that is not quite round, or
mechanical vibrations in the player
caused by footsteps in the room)
becomes translated into unwanted
noises upon playback.
3
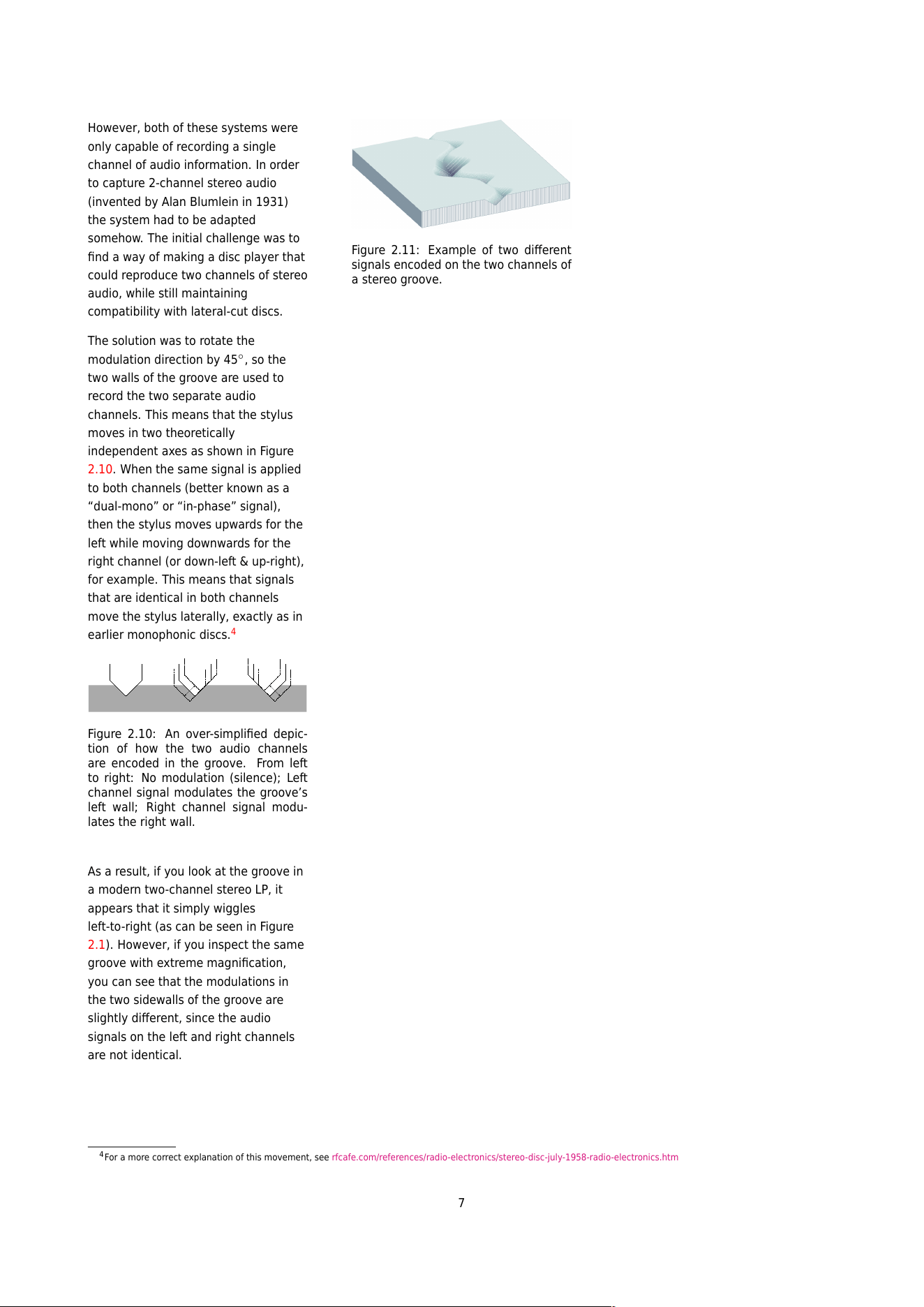
Figure 2.7: An Edison cylinder player, on
display in the Struer Museum.
Figure 2.8: A closeup of the Edison
player. Notice that the needle is
mounted to move vertically, modulating
a me mb ran e located at the end of the
tonearm (the bent pipe).
Berliner’s Gram oph one used a different
system, where the needle vibrated
sideways instead. This lateral cut
system produced a groove on the disc
with a constant depth, thus avoiding
some of the problems incurred by the
vertical cut recording system.
Figure 2.9: Example of an audio signal
encoded using a lateral cutting system.
2
see the Manual of Analogue Sound Restoration Techniques (2008), by Peter Copeland
3
Some 78 RPM discs use a vertical cutting system as well, including those made by Edison Disc Records a nd Pathé.
6
However, both of these systems were
only capable of recording a single
channel of audio information. In order
to capture 2-channel stereo audio
(invented by Alan Blumlein in 1931)
the system had to be adapted
somehow. The initial challenge was to
find a way of making a disc player that
could reproduce two channels of stereo
audio, while still maintaining
compatibility with lateral-cut discs.
The solution was to rotate the
modulation direction by 45
◦
, so the
two walls of the groove are used to
record the two separate audio
channels. This means that the stylus
moves in two theoretically
independent axes as shown in Figure
2.10. When the same signal is applied
to both channels (better known as a
“dual-mono” or “in-phase” signal),
then the stylus moves upwards for the
left while moving downwards for the
right channel (or down-left & up-right),
for example. This means that signals
that are identical in both channels
move the stylus laterally, exactly as in
earlier monophonic discs.
4
Figure 2.10: An over-simplified depic-
tion of how the two audio channe ls
are encoded in the groove. From left
to right: No modulation (silence); Left
channel signal modulates the groove’s
left wall; Right channel signal modu-
lates the right wall.
As a result, if you look at the groove in
a modern two-channel stereo LP, it
appears that it simply wiggles
left-to-right (as can be seen in Figure
2.1). However, if you inspect the same
groove with extreme magnification,
you can see that the modulations in
the two sidewalls of the groove are
slightly different, since the audio
signals on the left and right channels
are not identical.
Figure 2.11: Example of two different
signals encode d on the two channe ls of
a stereo groove.
4
For a more correct explanation of this movement, s ee rfcafe.com/references/radio-electronics/stereo-disc-july-1958-radio-electronics.htm
7
The cartridge, stylus, and
tonearm
3.1 MMC: Micro Moving Cross
As mentioned above, when a wire is
moved through a magnetic field, a
current is generated in it that is
proportional to the velocity of the
movement. In order to increase the
output, the wire can be wrapped into a
coil, effectively lengthening the piece
of wire moving through the field. Most
phono cartridges make use of this
behaviour by using the movement of
the stylus to either:
• move tiny magnets that are
placed near coils of wire (a
Moving Magnet or MM design )
or
• move tiny coils of wire that are
placed near very strong magnets
(a Moving Coil or MC design)
In either system, there is a relative
physical movement that is used to
generate the electrical signal from the
cartridge. There are advantages and
disadvantages associated with both of
these systems, however, they will not
be discussed here.
There is a third, less common design
called a Moving Iron (or
variable-reluctance
1
) system, which
can be thought of as a variant of the
Moving Magnet principle. In this
design, the magnet and the coils
remain stationary, and the stylus
moves a small piece of iron instead.
That iron is placed between the north
and south poles of the magnet so that,
when it moves, it modulates (or varies)
the magnetic field. As the magnetic
field modulates, it moves relative to
the coils, and an electrical signal is
generated. One of the first examples of
this kind of pickup was the Weste rn
Electric 4A reproducer made in 1925.
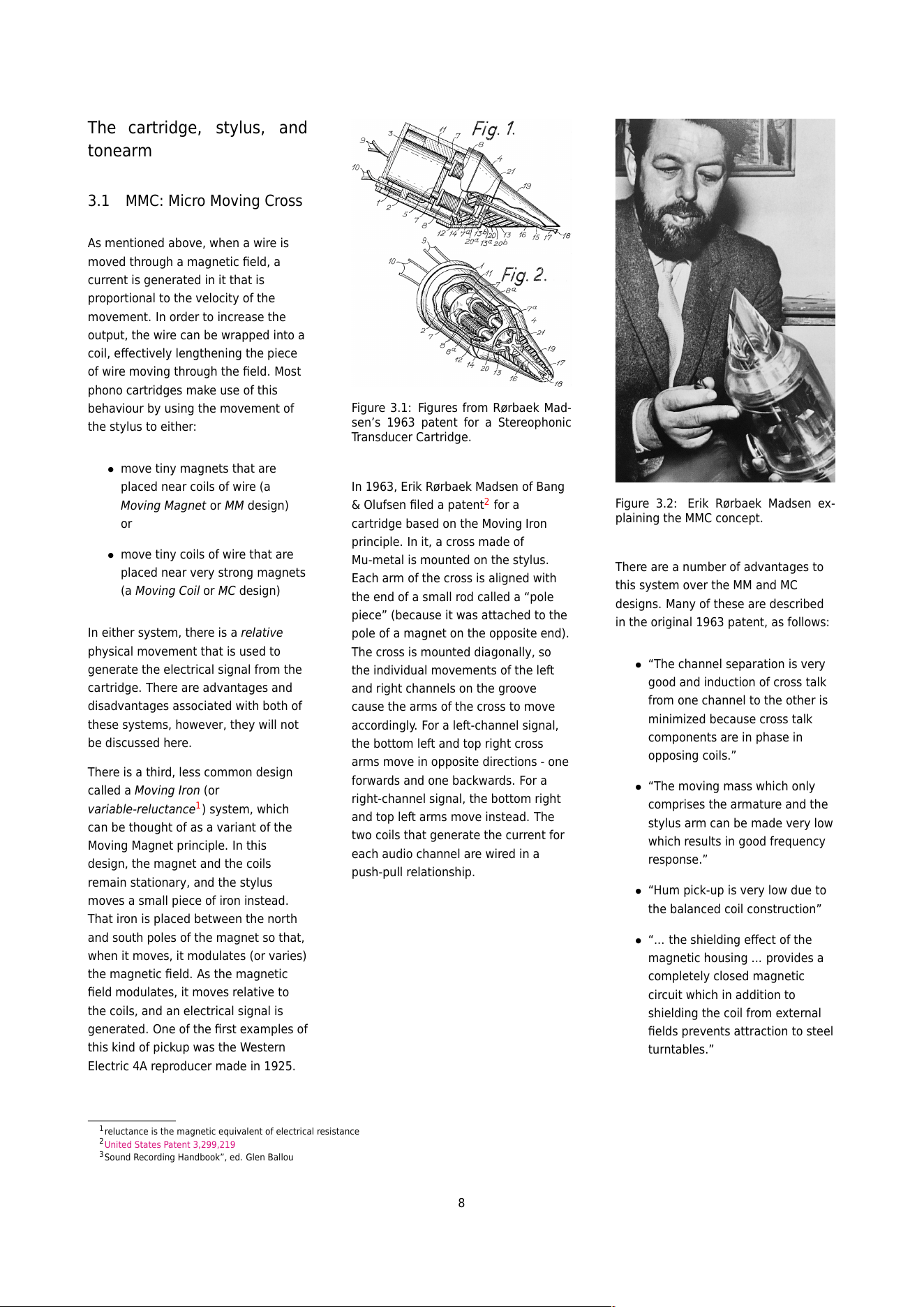
Figure 3.1: Figures from Rørbaek Mad-
sen’s 196 3 patent for a Stereophonic
Transducer Cartridge.
In 1963, Erik Rørbaek Madsen of Bang
& Olufsen filed a patent
2
for a
cartridge based on the Moving Iron
principle. In it, a cross made of
Mu-metal is mounted on the stylus.
Each arm of the cross is aligned with
the end of a small rod called a “pole
piece” (because it was attached to the
pole of a magnet on the opposite end).
The cross is mounted diagonally, so
the individual movements of the left
and right channels on the groove
cause the arms of the cross to move
accordingly. For a left-channel signal,
the bottom left and top right cross
arms move in opposite directions - one
forwards and one backwards. For a
right-channel signal, the bottom right
and top left arms move instead. The
two coils that generate the current for
each audio channel are wired in a
push-pull relationship.
Figure 3.2: Erik Rørbaek Madsen ex-
plaining the MMC concept.
There are a number of advantages to
this system over the MM and MC
designs. Many of these are described
in the original 1963 patent, as follows:
• “The channel separation is very
good and induction of cross talk
from one channel to the other is
minimized because cross talk
components are in phase in
opposing coils.”
• “The moving mass which only
comprises the armature and the
stylus arm can be made very low
which results in good frequency
response.”
• “Hum pick-up is very low due to
the balanced coil construction”
• “... the shielding effect of the
magnetic housing ... provides a
completely closed magnetic
circuit which in addition to
shielding the coil from external
fields prevents attraction to steel
turntables.”
1
reluctance is the magnetic equivalent of electrical resistance
2
United States Patent 3,299,219
3
Sound Recording Handbook”, ed. Glen Ballou
8
• Finally, (although this is not
mentioned in the patent) the
push-pull wiring of the coils
“reduces harmonic distortion
induced by the non-linearity of
the magnetic field.”
3
S
S
S
N
N
N
N
Figure 3.3: The magnetic circuit repre-
sentation of the MMC cartridge, show-
ing the diagonal pair of pole pieces for
one of the two audio channels.
Figure 3.4: A disassembled MMC 1 car-
tridge. This magnetic circuit is slightly
different than that shown in th e dia-
gram above. In this case, the magnet is
the small square with the hole, shown
on the right side of the photo. This is
mounted at the front of the pickup in-
stead of the rear. Note that the paper is
ruled in 5 mm squares.
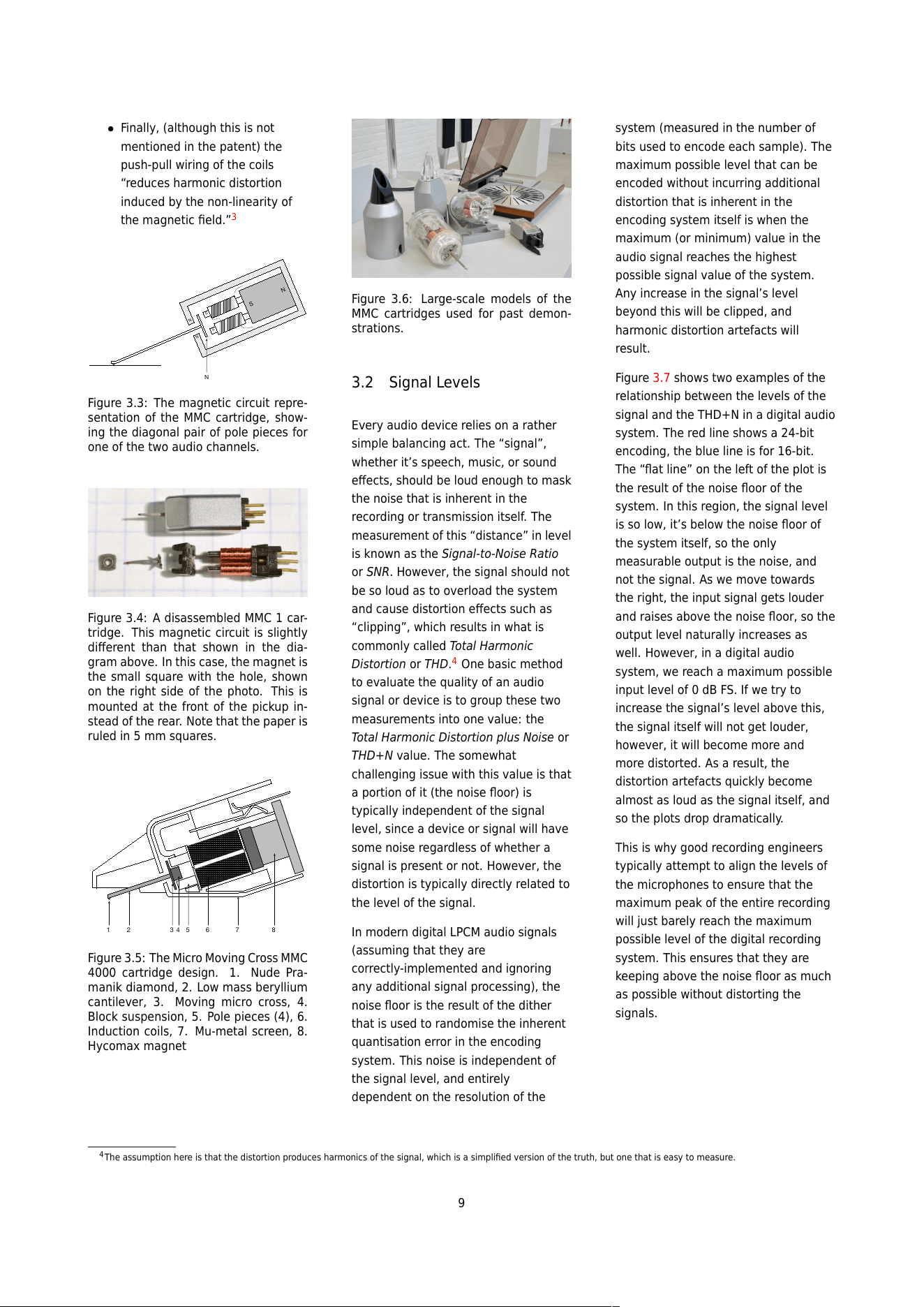
1 2 3 4 5 6 7 8
Figure 3.5: The Micro Moving Cross MMC
4000 cartridge design. 1. Nude Pra-
manik diamond, 2. Low mass ber ylliu m
cantilever, 3. Moving micro cross, 4.
Block suspen sio n, 5. Pole pieces (4), 6.
Induction coils, 7. Mu-metal screen, 8.
Hycomax magnet
Figure 3.6: Large-scale models of the
MMC cartridges used for past demon-
strations.
3.2 Signal Levels
Every audio device relies on a rather
simple balancing act. The “signal”,
whether it’s speech, music, or sound
effects, should be loud enough t o mask
the noise that is inherent in the
recording or transmission itself. The
measurement of this “distance” in level
is known as the Signal-to-Noise Ratio
or SNR. However, the signal should not
be so loud as to overload the system
and cause distortion effects such as
“clipping”, which results in what is
commonly called Total Harmonic
Distortion or THD.
4
One basic method
to evaluate the quality of an audio
signal or device is to group these two
measurements into one value: the
Total Harmonic Distortion plus Noise or
THD+N value. The somewhat
challenging issue with this value is that
a portion of it (the noise floor) is
typically independent of the signal
level, since a device or signal will have
some noise regardless of whether a
signal is present or not. However, the
distortion is typically directly related to
the level of the signal.
In modern digital LPCM audio signals
(assuming that they are
correctly-implemented and ignorin g
any additional signal processing), the
noise floor is the result of the dither
that is used to randomise the inherent
quantisation error in the encoding
system. This noise is independent of
the signal level, and entirely
dependent on the resolution of the
system (measured in the number of
bits used to encode each sample). The
maximum possible level that can be
encoded without incurring additional
distortion that is inherent in the
encoding system itself is when the
maximum (or minimum) value in the
audio signal reaches the highest
possible signal value of the system.
Any increase in the signal’s level
beyond this will be clipped, and
harmonic distortion artefacts will
result.
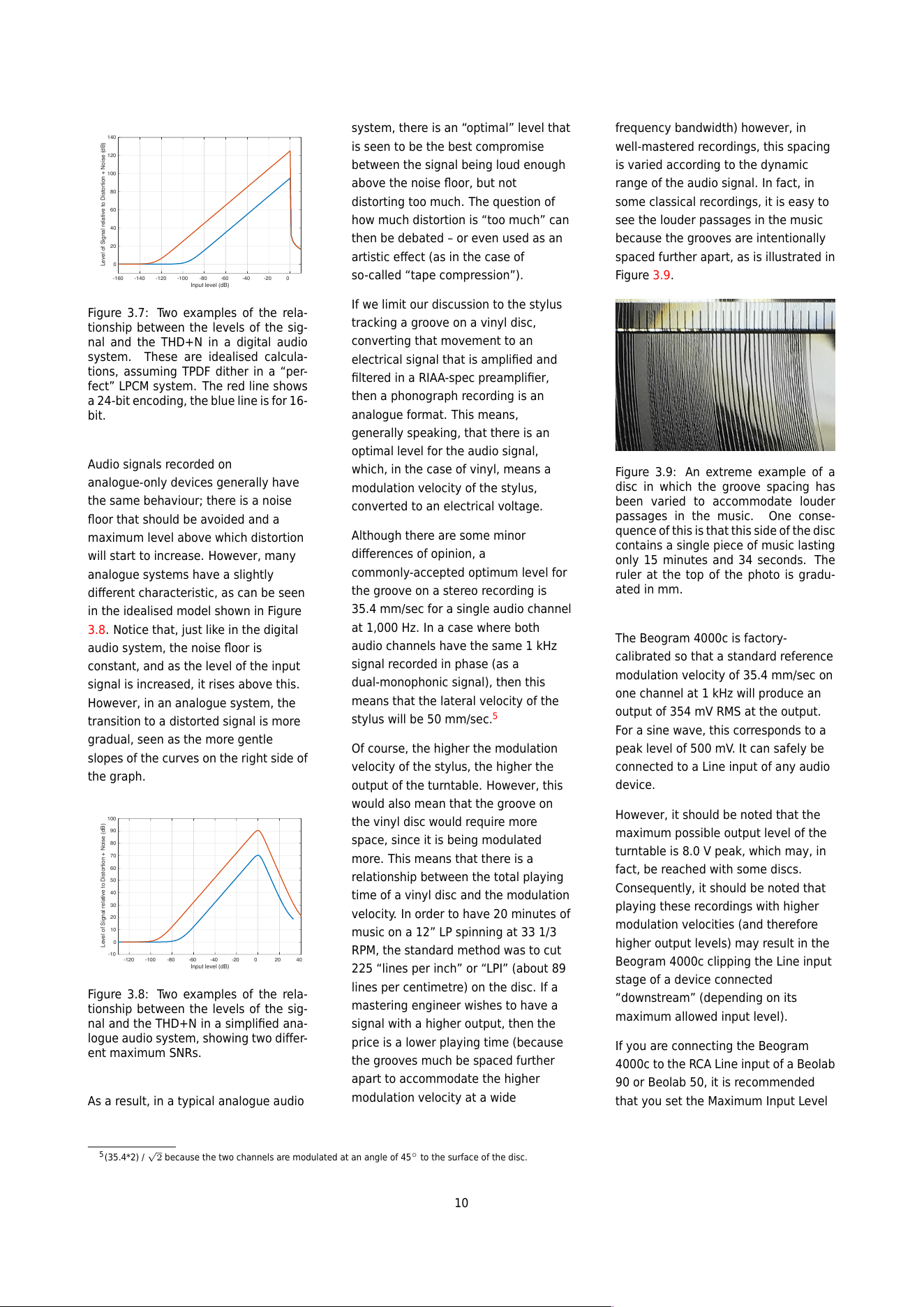
Figure 3.7 shows two examples of the
relationship between the levels of the
signal and the THD+N in a digita l audio
system. The red line shows a 24-bit
encoding, the blue line is for 16-bit.
The “flat line” on the left of the plot is
the result of the noise floor of the
system. In this region, the signal level
is so low, it’s below the noise floor of
the system itself, so the only
measurable output is the noise, and
not the signal. As we move towards
the right, the input signal gets louder
and raises above the noise floor, so the
output level naturally increases as
well. However, in a digital audio
system, we reach a maximum possible
input level of 0 dB FS. If we try to
increase the signal’s level above this,
the signal itself will not get louder,
however, it will become more and
more distorted. As a result, the
distortion artefacts quickly become
almost as loud as the signal itself, and
so the plots drop dramatically.
This is why good recording engineers
typically attempt to align the levels of
the microphones to ensure that the
maximum peak of the entire recording
will just barely reach the maximum
possible level of the digital recording
system. This ensures that they are
keeping above the noise floor as much
as possible without distorting the
signals.
4
The assumption here is that the distortion produces harmonics of the signal, which is a simplified v er s ion o f t he truth, but one that is easy to measure.
9
-160 -140 -120 -100 -80 -60 -40 -20 0
Input level (dB)
0
20
40
60
80
100
120
140
Level of Signal relative to Distortion + Noise (dB)
Figure 3.7: Two examples of the rela-
tionship between the levels of the sig-
nal an d the THD+N in a digital audio
system. These are idealised calcula-
tions, as s um ing TPDF dither in a “per-
fect” LPCM system. The red line shows
a 24-bit encoding, the blue line is for 16-
bit.
Audio signals recorded on
analogue-only devices generally have
the same behaviour; there is a noise
floor that should be avoided and a
maximum level above which distortion
will start to increase. How e ve r, ma ny
analogue systems have a slightly
different characteristic, as can be seen
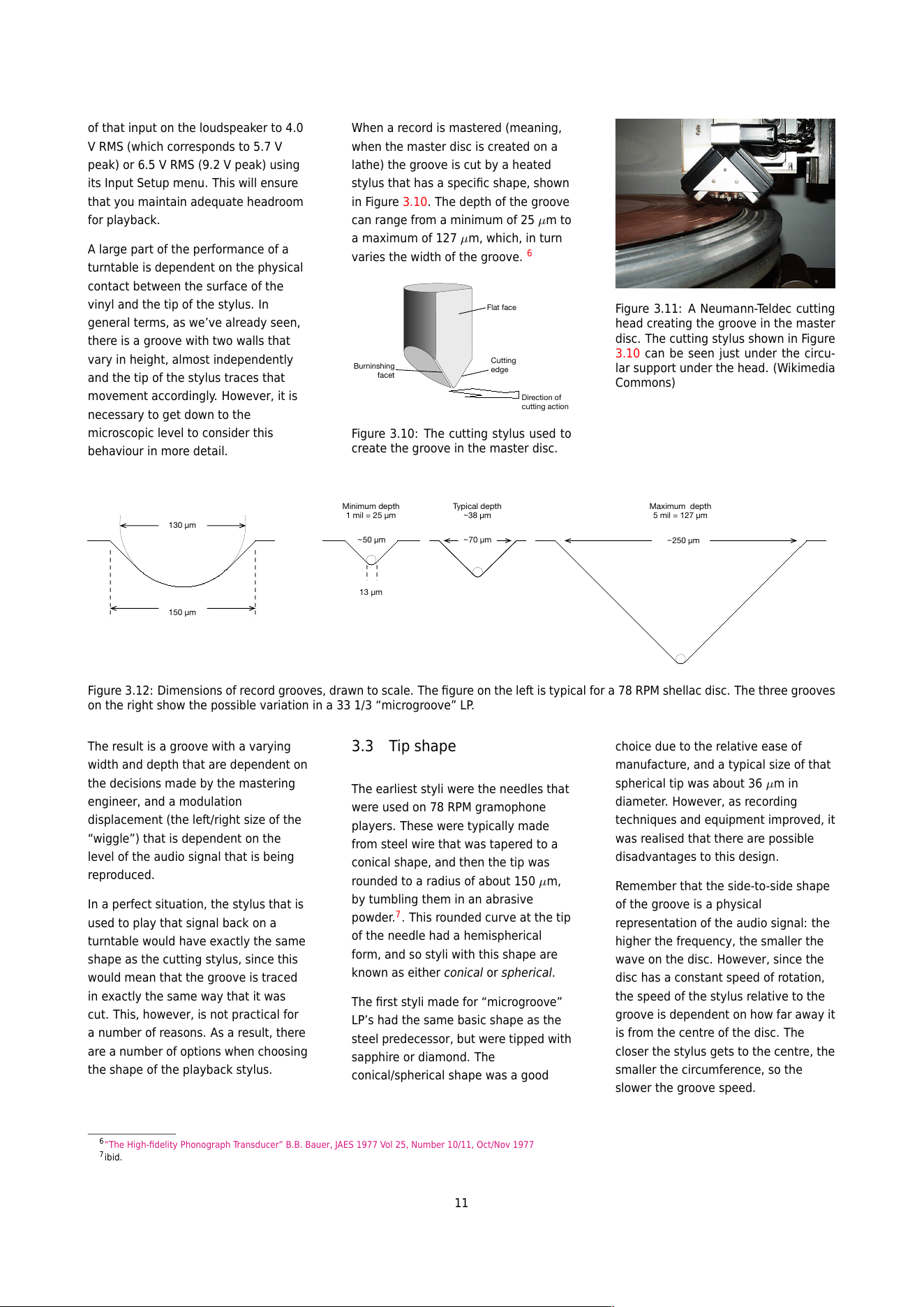
in the idealised model shown in Figure
3.8. Notice that, just like in the digital
audio system, the noise floor is
constant, and as the level of the input
signal is increased, it rises above this.
However, in an analogue system, the
transition to a distorted signal is more
gradual, seen as the more gentle
slopes of the curves on the right side of
the graph.
-120 -100 -80 -60 -40 -20 0 20 40
Input level (dB)
-10
0
10
20
30
40
50
60
70
80
90
100
Level of Signal relative to Distortion + Noise (dB)
Figure 3.8: Two examples of the rela-
tionship between the levels of the sig-
nal and the THD+N in a simplified ana-
logue audio system, showing two differ-
ent maximum SNRs.
As a result, in a typical analogue audio
system, there is an “optimal” level that
is seen to be the best compromise
between the signal being loud enough
above the noise floor, but not
distorting too much. The question of
how much distortion is “too much” can
then be debated – or even used as an
artistic effect (as in the case of
so-called “tape compression”).
If we limit our discussion to the stylus
tracking a groove on a vinyl disc,
converting that movement to an
electrical signal that is amplified and
filtered in a RIAA-spec preamplifier,
then a phonograph recording is an
analogue format. This means,
generally speaking, that there is an
optimal level for the audio signal,
which, in the case of vinyl, means a
modulation velocity of the stylus,
converted to an electrical voltage.
Although there are some minor
differences of opinion, a
commonly-accepted optimum level for
the groove on a stereo recording is
35.4 mm/sec for a single audio channel
at 1,000 Hz. In a case where both
audio channels have the same 1 kHz
signal recorded in phase (as a
dual-monophonic signal), then this
means that the lateral velocity of the
stylus will be 50 mm/sec.
5
Of course, the higher the modulation
velocity of the stylus, the higher the
output of the turntable. However, this
would also mean that the groove on
the vinyl disc would require more
space, since it is being modulated
more. This means that there is a
relationship between the total playing
time of a vinyl disc and the modulation
velocity. In order to have 20 minutes of
music on a 12” LP spinning at 33 1/3
RPM, the standard method was to cut
225 “lines per inch” or “LPI” (about 89
lines per centimetre) on the disc. If a
mastering engineer wishes to have a
signal with a higher output, then the
price is a lower playing time (because
the grooves much be spaced further
apart to accommodate the higher
modulation velocity at a wide
frequency bandwidth) however, in
well-mastered recordings, this spacing
is varied according to the dynamic
range of the audio signal. In fact, in
some classical recordings, it is easy to
see the louder passages in the music
because the grooves are intentionally
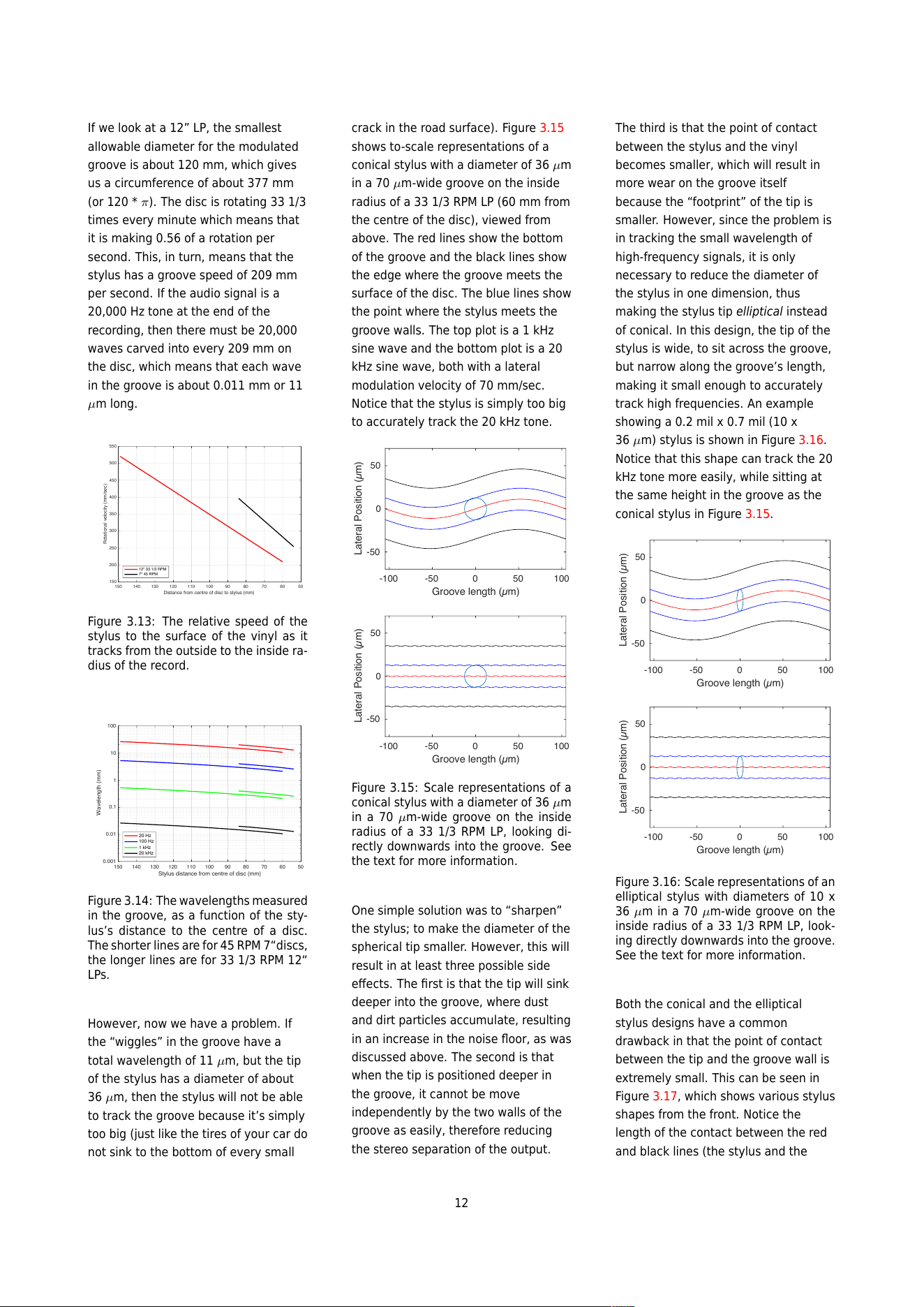
spaced further apart, as is illustrated in
Figure 3.9.
Figure 3.9: An extreme example of a
disc in which the groove spacing has
been varied to accommodate louder
passages in the mus ic . One conse-
quence of this is that this side of the disc
contains a single piece of music lasting
only 15 minutes and 34 seconds. The
ruler at the top of the photo is gradu-
ated in mm.
The Beogram 4000c is factory-
calibrated so that a standard reference
modulation velocity of 35.4 mm/sec on
one channel at 1 kHz will produce an
output of 354 mV RMS at the output.
For a sine wave, this corresponds to a
peak level of 500 mV. It can safely be
connected to a Line input of any audio
device.
However, it should be noted that the
maximum possible output level of the
turntable is 8.0 V peak, which may, in
fact, be reached with some discs.
Consequently, it should be noted that
playing these recordings with higher
modulation velocities (and therefore
higher output levels) may result in the
Beogram 4000c clipping the Line input
stage of a device connected
“downstream” (depending on its
maximum allowed input level).
If you are connecting the Beogram
4000c to the RCA Line input of a Be ola b
90 or Beolab 50, it is recommended
that you set the Maximum Input Level
5
(35.4*2) /
√
2 because the two channels are modulated at an angle of 45
◦
to the surface of the disc.
10
of that input on the loudspeaker to 4.0
V RMS (which corresponds to 5.7 V
peak) or 6.5 V RMS (9.2 V peak) using
its Input Setup menu. This will ensure
that you maintain adequate headroom
for playback.
A large part of the performance of a
turntable is dependent on the physical
contact between the surface of the
vinyl and the tip of the stylus. In
general terms, as we’ve already seen,
there is a groove with two walls that
vary in height, almost independently
and the tip of the stylus traces that
movement accordingly. However, it is
necessary to get down to the
microscopic level to consider this
behaviour in more detail.
When a record is mastered (meaning,
when the master disc is created on a
lathe) the groove is cut by a heated
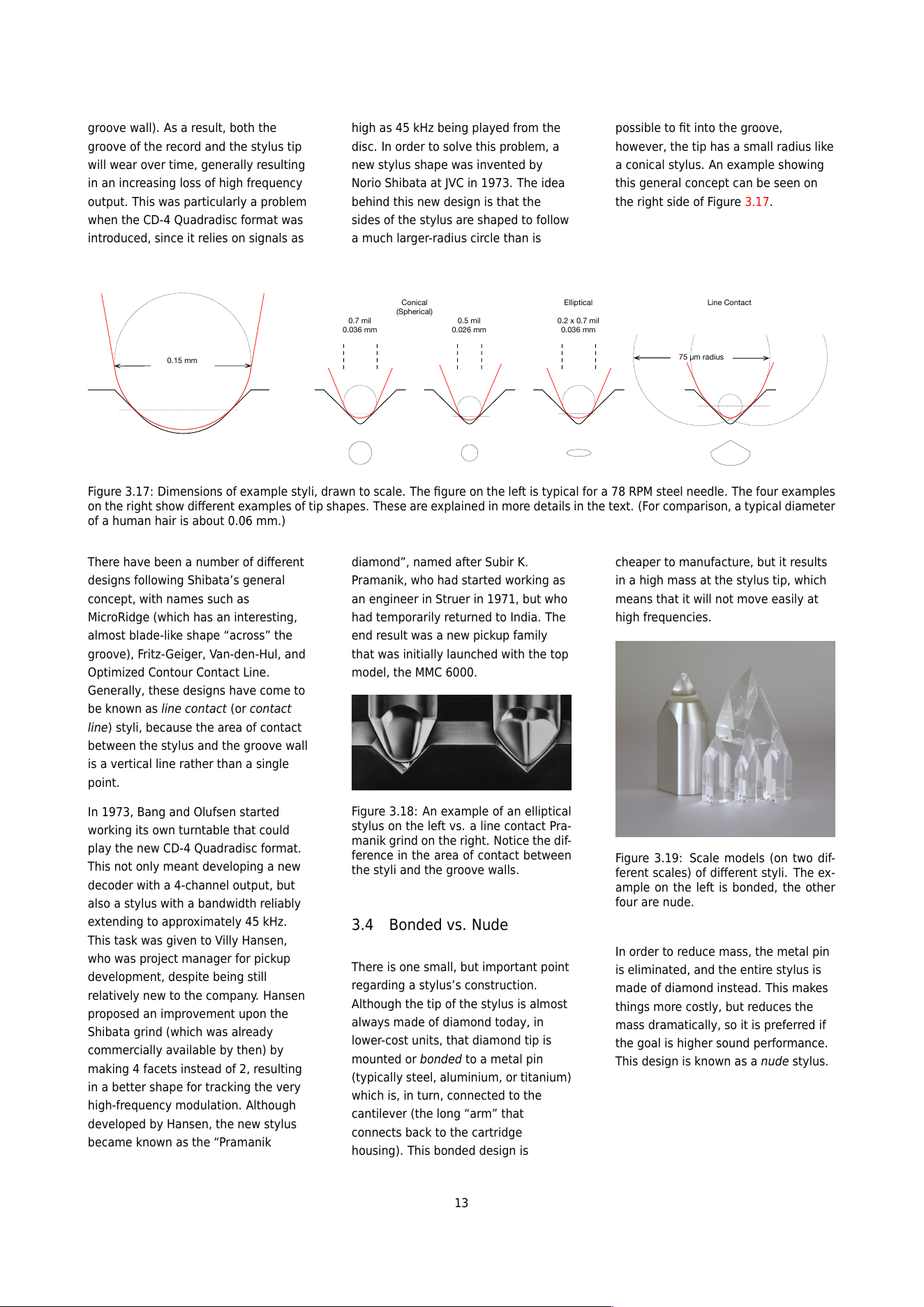
stylus that has a specific shape, shown
in Figure 3.10. The depth of the groove
can range from a minimum of 25 µm to
a maximum of 127 µm, which, in turn
varies the width of the groove.
6
Flat face
Burninshing!
facet
Cutting!
edge
Direction of!
cutting action
Figure 3.10: The cutting stylus used to
create the groove in the master disc.
Figure 3.11: A Neumann-Teldec cutting
head creating the groove in the master
disc. The cutting stylus shown in Figure
3.10 can be seen just under the circu-
lar support under the head. (Wikimedia
Commons)
150 µm
130 µm
13 µm
Minimum depth!
1 mil = 25 µm
Typical depth
~38 µm
Maximum depth!
5 mil = 127 µm
~ 70 µm
~ 250 µm
~ 50 µm
Figure 3.12: Dimensions of record grooves, dra wn to scale. The figure on the left is typical for a 78 RPM shellac disc. The three grooves
on the right show the possible variation in a 33 1/3 “microgroove” LP.
The result is a groove with a varying
width and depth that are dependent on
the decisions made by the mastering
engineer, and a modulation
displacement (the left/right size of the
“wiggle”) that is dependent on the
level of the audio signal that is being
reproduced.
In a perfect situation, the stylus that is
used to play that signal back on a
turntable would have exactly the same
shape as the cutting stylus, since this
would mean that the groove is traced
in exactly the same way that it was
cut. This, however, is not practical for
a number of reasons. As a result, there
are a number of options when choosing
the shape of the playback stylus.
3.3 Tip shape
The earliest styli were the needles that
were used on 78 RPM gramophone
players. These were typically made
from steel wire that was tapered to a
conical shape, and then the tip was
rounded to a radius of about 150 µm,
by tumbling them in an abrasive
powder.
7
. This rounded curve at the tip
of the needle had a hemispherical
form, and so styli with this shape are
known as either conical or spherical.
The first styli made for “microgroove”
LP’s had the same basic shape as the
steel predecessor, but were tipped with
sapphire or diamond. The
conical/spherical shape was a good
choice due to the relative ease of
manufacture, and a typical size of that
spherical tip was about 36 µm in
diameter. However, as recording
techniques and e quip me nt improved, it
was realised that there are possible
disadvantages to this design.
Remember that the side-to-side shape
of the groove is a physical
representation of the audio signal: the
higher the frequency, the smaller the
wave on the disc. However, since the
disc has a constant speed of rotation,
the speed of the stylus relative to the
groove is dependent on how far away it
is from the centre of the disc. The
closer the stylus gets to the centre, the
smaller the circumference, so the
slower the groove speed.
6
“The High-fidelity Phonograph Transducer” B. B. Bauer, JAES 1977 Vol 25, Number 10/11, Oct/Nov 1977
7
ibid.
11
If we look at a 12” LP, the smallest
allowable diameter for the modulated
groove is about 120 mm, which gives
us a circumference of about 377 mm
(or 120 * π). The disc is rotating 33 1/3
times every minute which means that
it is making 0.56 of a rotation per
second. This, in turn, means that the
stylus has a groove speed of 209 mm
per second. If the audio signal is a
20,000 Hz tone at the end of the
recording, then there must be 20,000
waves carved into every 209 mm on
the disc, which means that each wave
in the groove is about 0.011 mm or 11
µm long.
5060708090100110120130140150
Distance from centre of disc to stylus (mm)
150
200
250
300
350
400
450
500
550
Rotational velocity (mm/sec)
12" 33 1/3 RPM
7" 45 RPM
Figure 3.13: The relative speed of the
stylus to the surfac e of the vinyl as it
tracks from the out s ide to the inside ra-
dius of the record.
5060708090100110120130140150
Stylus distance from centre of disc (mm)
0.001
0.01
0.1
1
10
100
Wavelength (mm)
20 Hz
100 Hz
1 kHz
20 kHz
Figure 3.14: The wavelengths me as ured
in the gro ove , as a function of the sty-
lus’s distance to the centre of a disc.
The shorter lines are for 45 RPM 7“discs,
the longer lines are for 33 1/3 RPM 12“
LPs.
However, now we have a problem. If
the “wiggles” in the groove have a
total wavelength of 11 µm, but the tip
of the stylus has a diameter of about
36 µm, then the stylus will not be able
to track the groove because it’s simply
too big (just like the tires of your car do
not sink to the bottom of every small
crack in the road surface). Figure 3.15
shows to-scale representations of a
conical stylus with a diameter of 36 µm
in a 70 µm-wide groove on the inside
radius of a 33 1/3 RPM LP (60 mm from
the centre of the disc), viewed from
above. The red lines show the bottom
of the groove and the black lines show
the edge where the groove meets the
surface of the disc. The blue lines show
the point where the stylus meets the
groove walls. The top plot is a 1 kHz
sine wave and the bottom plot is a 20
kHz sine wave, both with a lateral
modulation velocity of 70 mm/sec.
Notice that the stylus is simply too big
to accurately track the 20 kHz tone.
-100 -50 0 50 100
Groove length (µm)
-50
0
50
Lateral Position (µm)
-100 -50 0 50 100
Groove length (µm)
-50
0
50
Lateral Position (µm)
Figure 3.15: Scale representations of a
conical stylus with a diameter of 36 µm
in a 70 µm-wide groove on the inside
radius of a 33 1/3 RPM LP, looking di-
rectly downwards into the groove. See
the text for more information.
One simple solution was to “sharpen”
the stylus; to make the diameter of the
spherical tip smaller. However, this will
result in at least three possible side
effects. The first is that the tip will sink
deeper into the groove, where dust
and dirt particles accumulate, resulting
in an increase in the noise floor, as was
discussed above. The second is that
when the tip is positioned deeper in
the groove, it cannot be move
independently by the two walls of the
groove as easily, therefore reducing
the stereo separation of the output.
The third is that the point of contact
between the stylus and the vinyl
becomes smaller, which will result in
more wear on the groove itself
because the “footprint” of the tip is
smaller. However, since the problem is
in tracking the small wavelength of
high-frequency signals, it is only
necessary to reduce the diameter of
the stylus in one dimension, thus
making the stylus tip elliptical instead
of conical. In this design, the tip of the
stylus is wide, to sit across the groove,
but narrow along the groove’s length,
making it small enough to accurately
track high frequencies. An example
showing a 0.2 mil x 0.7 mil (10 x
36 µm) stylus is shown in Figure 3.16.
Notice that this shape can track the 20
kHz tone more easily, while sitting at
the same height in the groove as the
conical stylus in Figure 3.15.
-100 -50 0 50 100
Groove length (µm)
-50
0
50
Lateral Position (µm)
-100 -50 0 50 100
Groove length (µm)
-50
0
50
Lateral Position (µm)
Figure 3.16: Scale representations of an
elliptical stylus with diameters of 10 x
36 µm in a 70 µm-wide groove on the
inside radius of a 33 1/3 RPM L P, look-
ing directly downwards into the groove.
See the text for more information.
Both the conical and the elliptical
stylus designs have a common
drawback in that the point of contact
between the tip and the groove wall is
extremely small. This can be seen in
Figure 3.17, which shows various stylus
shapes from the front. Notice the
length of the contact between the red
and black lines (the stylus and the
12
groove wall). As a result, both the
groove of the record and the stylus tip
will wear over time, generally resulting
in an increasing loss of high frequency
output. This was particularly a problem
when the CD-4 Quadradisc format was
introduced, since it relies on signals as
high as 45 kHz being played from the
disc. In order to solve this problem, a
new stylus shape was invented by
Norio Shibata at JVC in 1973. The idea
behind this new design is that the
sides of the stylus are shaped to follow
a much larger-radius circle than is
possible to fit into the groove,
however, the tip has a small radius like
a conical stylus. An example showing
this general concept can be seen on
the right side of Figure 3.17.
0.036 mm
0.7 mil 0.5 mil
Conical!
(Spherical)
Elliptical!
0.2 x 0.7 mil
0.026 mm 0.036 mm
75 µm radius
0.15 mm
Line Contact!
Figure 3.17: Dimensions of example styli, drawn to scale. The figure on the left is typical for a 78 RPM s te el needle. The four examples
on the right show different examples of tip shapes. These are explained in more details in the text. (For comparison, a typical diameter
of a human hair is about 0.06 mm.)
There have been a number of different
designs following Shibata’s general
concept, with names such as
MicroRidge (which has an interesting,
almost blade-like shape “across” the
groove), Fritz-Geiger, Van-den-Hul, and
Optimized Contour Contact Line.
Generally, these designs have come to
be known as line contact (o r cont ac t
line) styli, because the area of contact
between the stylus and the groove wall
is a vertical line rather than a single
point.
In 1973, Bang and Olufsen started
working its own turntable that could
play the new CD-4 Quadradisc format.
This not only meant developing a new
decoder with a 4-channel output, but
also a stylus with a bandwidth reliably
extending to approximately 45 kHz.
This task was given to Villy Hansen,
who was project manager for pickup
development, despite being still
relatively new to the company. Hansen
proposed an improvement upon the
Shibata grind (which was already
commercially available by then) by
making 4 facets instead of 2, resulting
in a better shape for tracking the very
high-frequency modulation. Although
developed by Hansen, the new stylus
became known as the “Pramanik
diamond”, named after Subir K.
Pramanik, who had started working as
an engineer in Struer in 1971, but who
had temporarily returned to India. The
end result was a new pickup family
that was initially launched with the top
model, the MMC 6000.
Figure 3.18: An example of an elliptical
stylus on the left vs. a line contact Pra-
manik grind on the right. Notice the dif-
ference in the area of contact between
the styli and the groove walls.
3.4 Bonded vs. Nude
There is one small, but important point
regarding a stylus’s construction.
Although the tip of the stylus is almost
always made of diamond today, in
lower-cost units, that diamond tip is
mounted or bonded to a metal pin
(typically steel, aluminium, or titanium)
which is, in turn, connected to the
cantilever (the long “arm” that
connects back to the cartridge
housing). This bonded design is
cheaper to manufacture, but it results
in a high mass at the stylus tip, which
means that it will not move easily at
high frequencies.
Figure 3.19: Scale models (on two dif-
ferent scales) of different styli. The ex-
ample on the left is bonded, the other
four are nude.
In order to reduce mass, the metal pin
is eliminated, and the entire stylus is
made of diamond instead. This makes
things more costly, but reduces the
mass dramatically, so it is preferred if
the goal is higher sound performance.
This design is known as a nude stylus.
13
3.5 Tracking force
In order to keep the stylus tip in the
groove of the record, it must have
some force pushing down on it. This
force must be enough to keep the
stylus in the groove. Howev er , if it is
too large, then both the vinyl and the
stylus will wear more quickly. Thus a
balance must be found between “too
much” and “not enough”.
1920 1930 1940 1950 1960 1970 1980 1990 2000 2010 2020
Year
0.1
1
10
100
Typical tracking force (g)
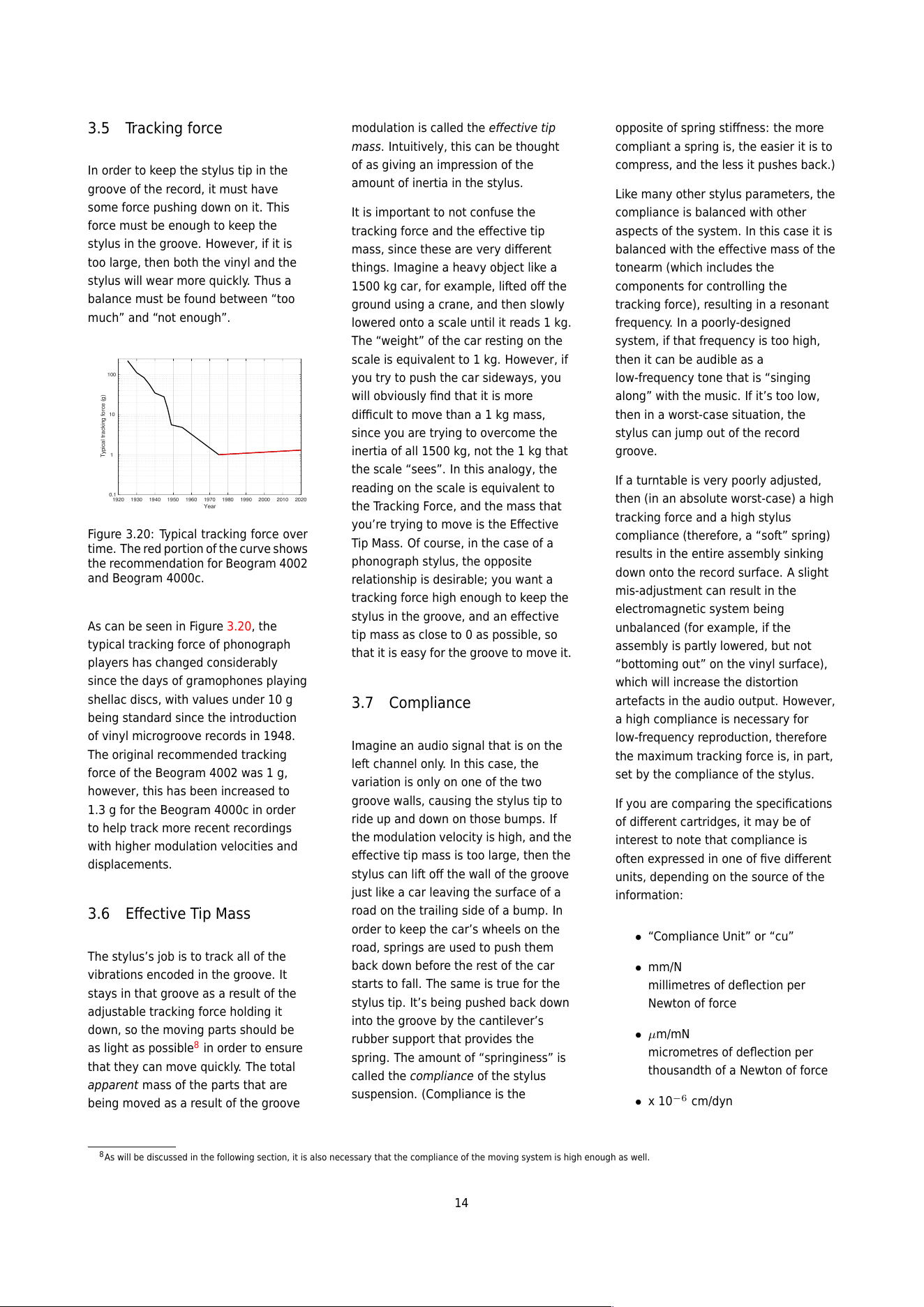
Figure 3.20: Typical tracking force over
time. The red portion of the curve shows
the recommendation for Beogram 4002
and Beogram 4000c.
As can be seen in Figure 3.20, the
typical tracking force of phonograph
players has changed considerably
since the days of gramophones playing
shellac discs, with values under 10 g
being standard since the introduction
of vinyl microgroove records in 1948.
The original recommended tracking
force of the Beogram 4002 was 1 g,
however, this has been increased to
1.3 g for the Beogram 4000c in order
to help track more recent recordings
with higher modulation velocities and
displacements.
3.6 Effective Tip Mass
The stylus’s job is to track all of the
vibrations encoded in the groove. It
stays in that groove as a result of the
adjustable tracking force holding it
down, so the moving parts should be
as light as possible
8
in order to ensure
that they can move quickly. The total
apparent mas s of the par ts th at are
being moved as a result of the groove
modulation is called the effective tip
mass. Intuitively, this can be thought
of as giving an impression of the
amount of inertia in the stylus.
It is important to not confuse the
tracking force and the effective tip
mass, since these are very different
things. Imagine a heavy object like a
1500 kg car, for example, lifted off the
ground using a crane, and then slowly
lowered onto a scale until it reads 1 kg.
The “weight” of the car resting on the
scale is equivalent to 1 kg. However, if
you try to push the car sideways, you
will obviously find that it is more
difficult to move than a 1 kg mass,
since you are trying to overcome the
inertia of all 1500 kg, not the 1 kg that
the scale “sees”. In this analogy, the
reading on the scale is equivalent to
the Tracking Force, and the mass that
you’re trying to move is the Effective
Tip Mass. Of course, in the case of a
phonograph stylus, the opposite
relationship is desirable; you want a
tracking force high enough to keep the
stylus in the groove, and an effective
tip mass as close to 0 as possible, so
that it is easy for the groove to move it.
3.7 Compliance
Imagine an audio signal that is on the
left channel only. In this case, the
variation is only on one of the two
groove walls, causing the stylus tip to
ride up and down on those bumps. If
the modulation velocity is high, and the
effective tip mass is too large, then the
stylus can lift off the wall of the groove
just like a car leaving the surface of a
road on the trailing side of a bump. In
order to keep the car’s wheels on the
road, springs are used to push them
back down before the rest of the car
starts to fall. The same is true for the
stylus tip. It’s being pushed back down
into the groove by the cantilever’s
rubber support that provides the
spring. The amount of “springiness” is
called the compliance of the stylus
suspension. (Compliance is the
opposite of spring stiffness: the more
compliant a spring is, the easier it is to
compress, and the less it pushes back.)
Like many other stylus parameters, the
compliance is balanced with other
aspects of the system. In this case it is
balanced w ith the effective mass of the
tonearm (which includes the
components for controlling the
tracking force), resulting in a resonant
frequency. In a poorly-designed
system, if that frequency is too high,
then it can be audible as a
low-frequency tone that is “singing
along” with the music. If it’s too low,
then in a worst-case situation, the
stylus can jump out of the record
groove.
If a turntable is very poorly adjusted,
then (in an absolute worst-case) a high
tracking force and a high stylus
compliance (therefore, a “soft” spring)
results in the entire assembly sinking
down onto the record surface. A slight
mis-adjustment can result in the
electromagnetic system being
unbalanced (for example, if the
assembly is partly lowered, but not
“bottoming out” on the vinyl surface),
which will increase the distortion
artefacts in the audio output. However,
a high compliance is necessary for
low-frequency reproduction, therefore
the maximum tracking force is, in part,
set by the compliance of the stylus.
If you are comparing the specifications
of different cartridges, it may be of
interest to note that compliance is
often expressed in one of five different
units, depending on the source of the
information:
• “Compliance Unit” or “cu”
• mm/N
millimetres of deflection per
Newton of force
• µm/mN
micrometres of deflection per
thousandth of a Newton of force
• x 10
−6
cm/dyn
8
As will be discussed in the following section, it is also necessary that the compliance of the moving system is high enough as well.
14
hundredths of a micrometre of
deflection per dyne of force
• x 10
−6
cm/10
−5
N
hundredths of a micrometre of
deflection per hundred-
thousandth of a Newton of force
Since
• mm/N = 1000 µm / 1000 mN
• 1 dyne = 0.00001 Newton
Then this means that all five of these
expressions are identical, so, they can
be interchanged freely. In other words:
20 CU
= 20 mm / N
= 20 µm / mN
= 20 x 10
−6
cm / dyn
= 20 x 10
−6
cm / 10
−5
N
3.8 Soundsmith SMMC20CL
Today, the Beogram 4000c is supplied
with an SMMC20CL cartridge made by
Soundsmith. This is a nude contact line
diamond stylus with a solid sapphire
cantilever. It is a variable reluctance
design, based on the original Bang &
Olufsen Micro Moving Cross
construction.
The SMMC20CL has an effective tip
mass of 0.32 mg, lower than the 0.5
mg of the original MMC 4000 cartridge,
but slightly higher than the 0.22 mg in
the MMC 6000 cartridge.
3.9 Tangential Tracking
When a record master is cut on a lathe,
the cutter head follows a straight-line
path as it moves from the outer rim to
the inside of the disk. This means that
it is always modulating in a direction
that is perpendicular to the groove’s
relative direction of travel, regardless
of its distance from the centre.
Cutter head
Path of
movement
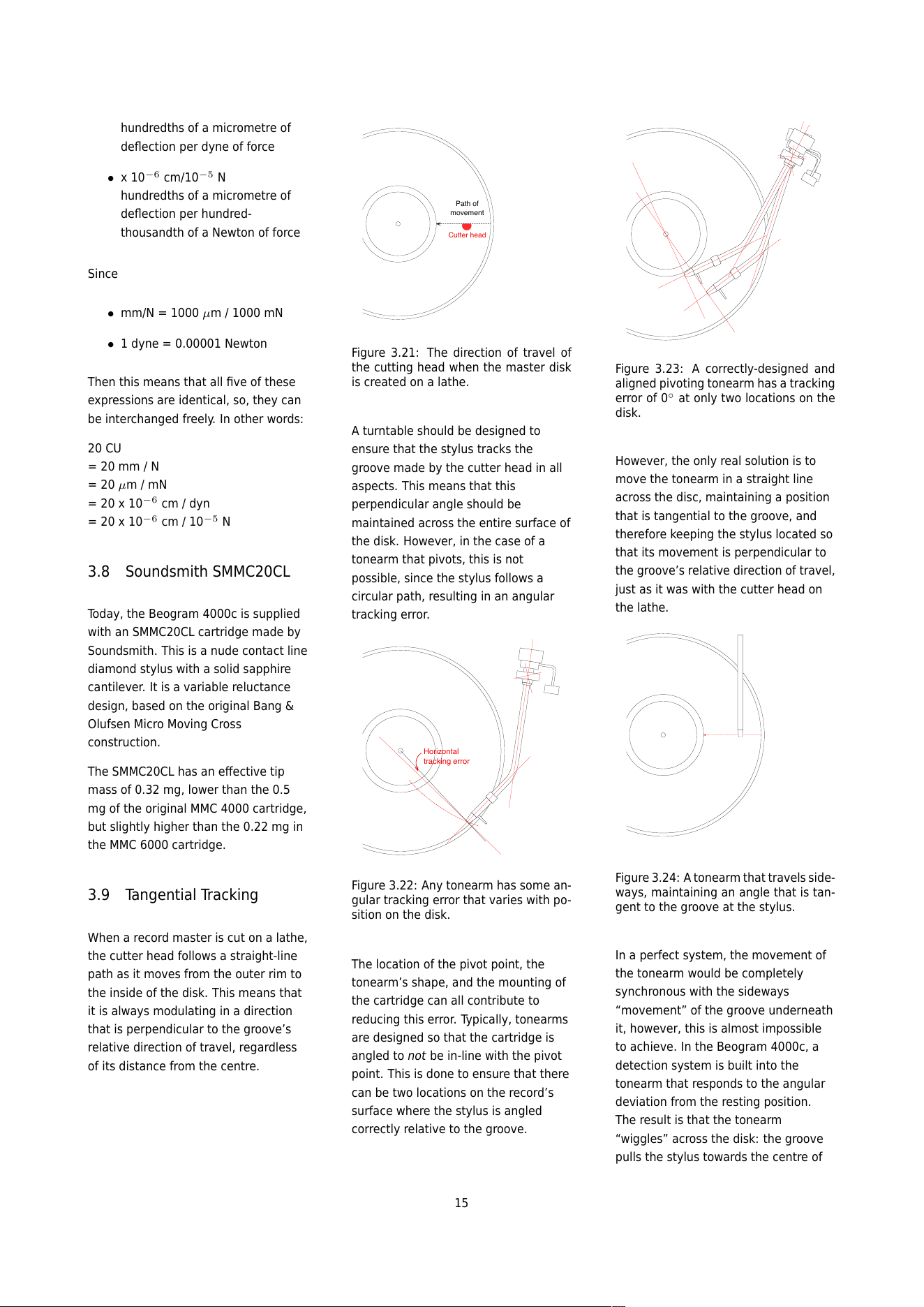
Figure 3.21: The direction of travel of
the cutting head when the master disk
is created on a lathe.
A turntable should be designed to
ensure that the stylus tracks the
groove made by the cutter head in all
aspects. This means that this
perpendicular angle should be
maintained across the entire surface of
the disk. However, in the case of a
tonearm that pivots, this is not
possible, since the stylus follows a
circular path, resulting in an angular
tracking error.
Horizontal
tracking error
Figure 3.22: Any tonearm has some an-
gular tracking error that varies with po-
sition on the disk.
The location of the pivot point, the
tonearm’s shape, and the mounting of
the cartridge can all contribute to
reducing this error. Typically, tonearms
are designed so that the cartridge is
angled to not be in-line with the pivot
point. This is done to ensure that there
can be two locations on the record’s
surface where the stylus is angled
correctly relative to the groove.
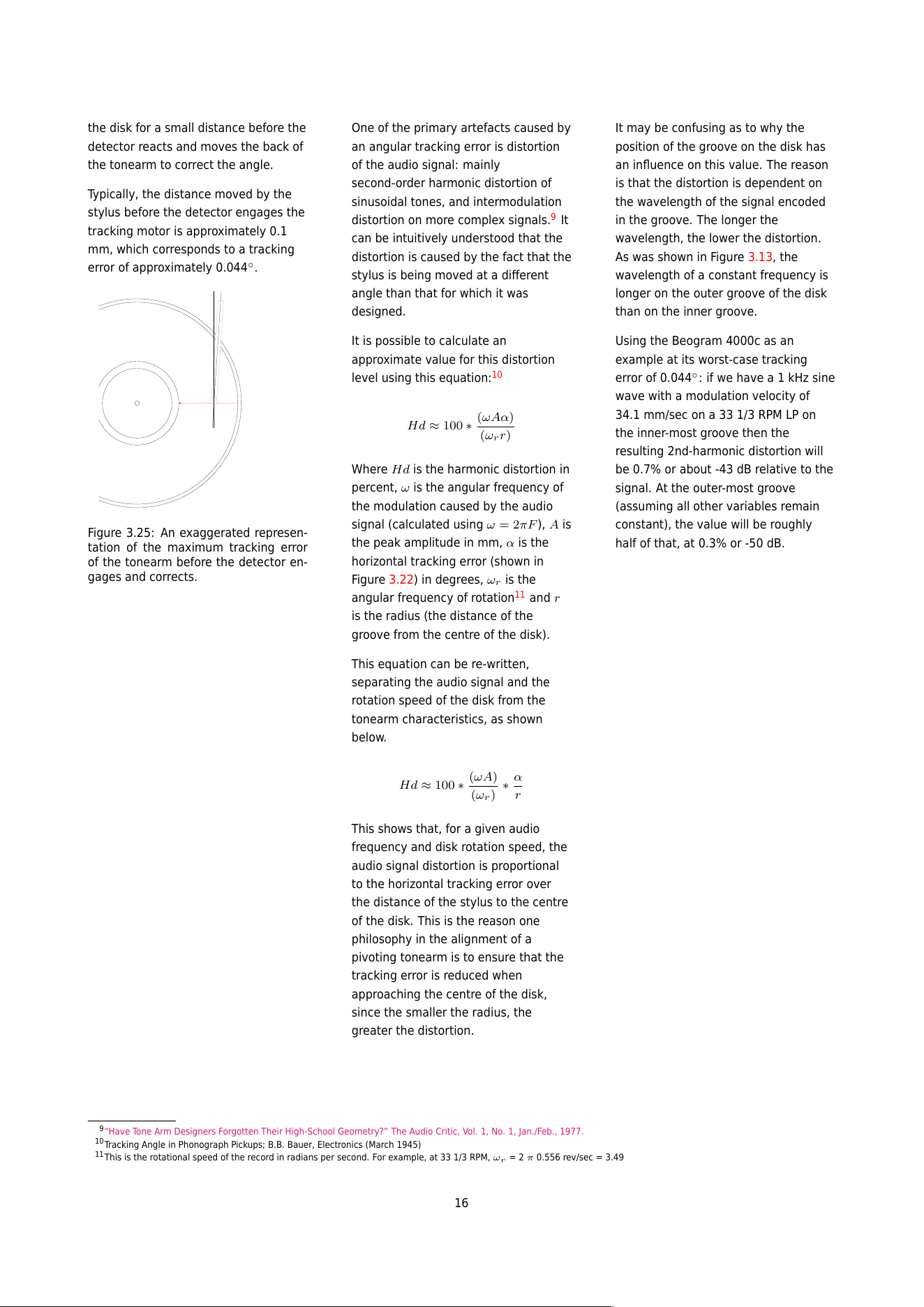
Figure 3.23: A correctly-designed and
aligned pivoting tonearm has a tracking
error of 0
◦
at only two locations on the
disk.
However, the only real solution is to
move the tonearm in a straight line
across the disc, maintaining a position
that is tangential to the groove, and
therefore keeping the stylus located so
that its movement is perpendicular to
the groove’s relative direction of travel,
just as it was with the cutter head on
the lathe.
Figure 3.24: A tonearm that travels side-
ways, maintaining an angle that is tan-
gent to the groove at the stylus.
In a perfect system, the movement of
the tonearm would be completely
synchronous with the sideways
“movement” of the groove underneath
it, however, this is almost impossible
to achieve. In the Beogram 4000c, a
detection system is built into the
tonearm that responds to the angular
deviation from the resting position.
The result is that the tonearm
“wiggles” across the disk: the groove
pulls the stylus towards the centre of
15
the disk for a small distance before the
detector reacts and moves the back of
the tonearm to correct the angle.
Typically, the dist anc e mov ed by the
stylus before the detector engages the
tracking motor is approximate ly 0.1
mm, which corresponds to a tracking
error of approximate ly 0.04 4
◦
.
Figure 3.25: An exaggerated represen-
tation of the maximum tracking error
of the tonearm before the detector en-
gages and corrects.
One of the primary artefacts caused by
an angular tracking error is distortion
of the audio signal: mainly
second-order harmonic distortion of
sinusoidal tones, and intermodulation
distortion on more complex signals.
9
It
can be intuitively understood that the
distortion is c au se d by the fact that the
stylus is being moved at a different
angle than that for which it was
designed.
It is possible to calculate an
approximate value for this distort ion
level using this equation:
10
Hd ≈ 100 ∗
(ωAα)
(ω
r
r)
Where Hd is the harmonic distortion in
percent, ω is the angular frequency of
the modulation caused by the audio
signal (calculated using ω = 2πF ), A is
the peak amplitude in mm, α is the
horizontal tracking error (shown in
Figure 3.22) in degrees, ω
r
is the
angular frequency of rotation
11
and r
is the radius (the distance of the
groove from the centre of the disk).
This equation can be re-written,
separating the audio signal and the
rotation speed of the disk from the
tonearm characteristics, as shown
below.
Hd ≈ 100 ∗
(ωA)
(ω
r
)
∗
α
r
This shows that, for a given audio
frequency and disk rotation speed, the
audio signal distortion is proportional
to the horizontal tracking error over
the distance of the stylus to the centre
of the disk. This is the reason one
philosophy in the alignment of a
pivoting tonearm is to ensure that the
tracking error is reduced when
approaching the centre of the disk,
since the smaller the radius, the
greater the distortion.
It may be confusing as to why the
position of the groove on the disk has
an influence on this value. The reason
is that the distortion is dependent on
the wavelength of the signal encoded
in the groove. The longer the
wavelength, the lower the distortion.
As was shown in Figure 3.13, the
wavelength of a constant frequency is
longer on the outer groove of the disk
than on the inner groove.
Using the Beogram 4000c as an
example at its worst-case tracking
error of 0.044
◦
: if we have a 1 kHz sine
wave with a modulation velocity of
34.1 mm/sec on a 33 1/3 RPM LP on
the inner-most groove then the
resulting 2nd-harmonic distortion will
be 0.7% or about -43 dB relative to the
signal. At the outer-most groove
(assuming all other variables remain
constant), the value will be roughly
half of that, at 0.3% or -50 dB.
9
“Have Tone Arm Designers Forgotten Their High-School Geometry?” The Audio Critic, Vol. 1, No. 1, Jan./Feb., 1977.
10
Tracking Angle in Phonograph Pickups; B.B. Bauer, Electronics (March 1945)
11
This is the rotational speed of the record in radians per second. For example, at 33 1/3 RPM, ω
r
= 2 π 0.556 rev/sec = 3.49
16
Audio Specifications
4.0.1 Magnitude Response
The magnitude response
1
of any audio
device is a measure of how much its
output level deviates from the
expected level at different frequencies.
In a turntable, this can be measured in
different ways.
In the case of the Beogram 4000c, the
magnitude response is measured from
a standard test disc with a sine wave
sweep ranging from at least 20 Hz to at
least 20 kHz. The output level of this
signal is recorded at the output of the
device, and the level is analysed to
determine how much it differs from the
expected output. Consequently, the
measurement includes all components
in the audio path from the stylus tip,
through the RIAA preamplifier, to the
line-level outputs.
4.0.2 Rumble
In theory, an audio playback device
only outputs the audio signal that is on
the recording without any extra
contributions. In practice, however,
every audio device adds signals to the
output for various reasons. As was
discussed above, in the specific case of
a turntable, the audio signal is initially
generated by very small movements of
the stylus in the record groove.
Therefore, in order for it to work at all,
the system must be sensitive to very
small movements in general. This
means that any additional movement
can (and probably will) be converted to
an audio signal that is added to the
recording.
This unwanted extraneous movement,
and therefore signal, is usually the
result of very low-frequency vibrations
that come from various sources. These
can include things like mechanical
vibrations of the entire turntable
transmitted through the table from the
floor, vibrations in the system caused
by the motor or imbalances in the
moving parts, warped discs which
cause a vertical movement of the
stylus, and so on. These low-frequency
signals are grouped together under the
heading of rumble.
A rumble measurement is performed
by playing a disc that has no signal on
it, and measuring the output signal’s
level. However, that output signal is
first filtered
2
to ensure that the level
detection is not influenced by
higher-frequency problems that may
exist.
If the standard being used for the
rumble measurement is the DIN 45 539
specification, then the resulting value
is stated as the level difference
between the measured filtered noise
and the standard output level,
equivalent to the output when playing
a 1 kHz tone with a lateral modulation
velocity of 70.7 mm/sec. In other
words, it states how much quieter the
rumble is than a relatively loud audio
signal.
4.0.3 Rotational speed
Every recording / playback system,
whether for audio or for video signals,
is based on the fundamental principle
that the recording and the playback
happen at the same rate. For example,
a film that was recorded at 24 frames
(or photos) per second (FPS) must also
be played at 24 FPS to avoid objects
and persons moving too slowly or too
quickly. It’s also necessary that neither
the recording nor the playback speed
changes over time.
A phonographic LP is mastered with
the intention that it will be played back
at a rotational speed of 33 1/3 RPM
(Revolutions Per Minute) or 45 RPM,
depending on the disc. (These
correspond to 1 revolution either every
1.8 seconds or every 1 1/3 seconds
respectively.) We assume that the
rotational speed of the lathe that was
used to cut the master was both very
accurate and very stable. Although it is
the job of the turntable to duplicate
this ac cu ra cy and stability as closely as
possible, measurable errors occur for a
number of reasons, both mechanical
and electrical. When these errors are
measured using especially-created
audio signals like pure sine tones, the
results are filtered and analyzed to
give an impression of how audible they
are when listening to music. However,
a problem arises in that a simple
specification (such as a single number
for “Wow and Flutter”, for example)
can only be correctly interpreted with
the knowledge of how the value is
produced.
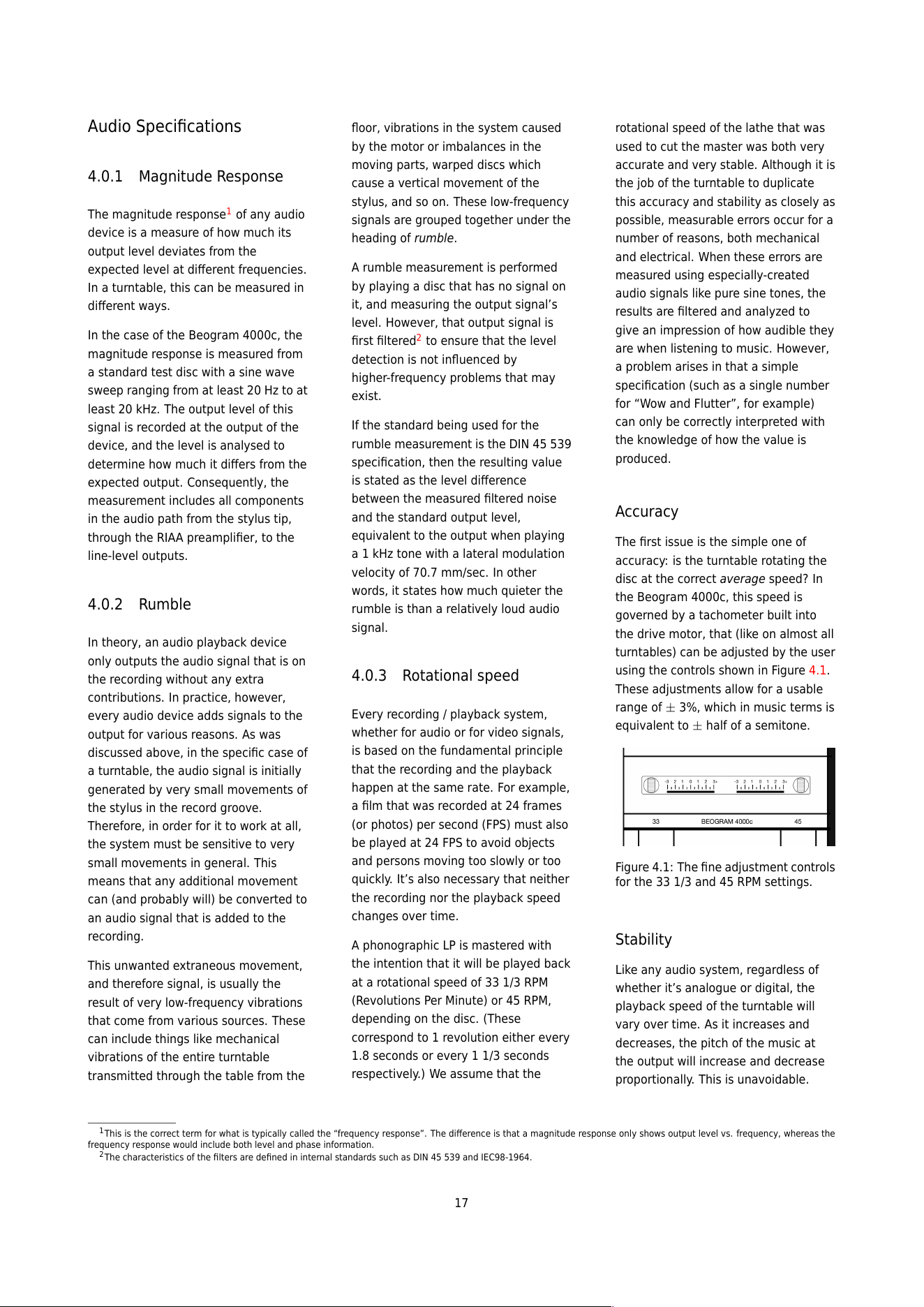
Accuracy
The first issue is the simple one of
accuracy: is the turntable rotating the
disc at the correct average speed? In
the Beogram 4000c, this speed is
governed by a tachometer built into
the drive motor, that (like on almost all
turntables) can be adjusted by the user
using the controls shown in Figure 4.1.
These adjustments allow for a usable
range of ± 3%, which in music terms is
equivalent to ± half of a semitone.
Figure 4.1: The fine adjustment controls
for the 33 1/3 and 45 RPM settings.
Stability
Like any audio system, regardless of
whether it’s analogue or digital, the
playback speed of the turntable will
vary over time. As it increases and
decreases, the pitch of the music at
the output will increase and decrease
proportionally. This is unavoidable .
1
This is the correct term for what is typically called the “frequency response”. The difference is that a magnitude response only shows output level vs. frequency, whereas the
frequency response would include both level and p has e information.
2
The characteristics of the filters are defined in internal standards such as D IN 45 539 and IEC98-1964.
17
Therefore, there are two questions that
result:
• How much does the speed
change?
• What is the rate and pattern of
the change?
In a turntable, the amount of the
change in the rotational speed is
directly proportional to the frequency
shift in the audio output. Therefore for
example, if the rotational speed
decreases by 1% (for example, from 33
1/3 RPM to exactly 33 RPM), the audio
output will drop in frequency by 1% (so
a 440 Hz tone will be played as a
440*0.99 = 435.6 Hz tone). Whether
this is audible is dependent on
different factors including
• the rate of change to the new
speed
(a 1% change 4 times a second is
much easier to hear than a 1%
change lasting 1 hour)
• the listener’s abilities
(for example, a person with
“absolute pitch” may be able to
recognise the change)
• the audio signal
(It is easier to detect a frequency
shift of a single, long tone such
as a note on a piano or pipe
organ than it is of a short sound
like a strike of claves or a sound
with many enharmonic
frequencies such as a snare
drum.)
In an effort to simplify the specification
of stability in analogue playback
equipment such as turntables, four
different classifications are used, each
corresponding to different rates of
change. These are drift, wow, flutter,
and scrape, the two most popular of
which are wow and flutter, and are
typically grouped into one value to
represent them.
Drift
Frequency drift is the tendency of a
playback device’s speed to change
over time very slowly. Any variation
that happens slower than once every 2
seconds (in other words, with a
modulation frequency of less than 0.5
Hz) is considered to be drift. This is
typically caused by changes such as
temperature (as the playback device
heats up) or variations in the power
supply (due to changes in the mains
supply, which can vary with changing
loads throughout the day).
Wow
Wow is a modulation in the speed
ranging from once every 2 seconds to
6 times a second (0.5 Hz to 6 Hz). Note
that, for a turntable, the rotational
speed of the disc is within this range.
(At 33 1/3 RPM: 1 revolution every 1.8
seconds is equal to approximately
0.556 Hz.)
Flutter
Flutter describes a modulation in the
speed ranging from 6 to 100 times a
second (6 Hz to 100 Hz).
Scrape
Scrape or scrape flutter describes
changes in the speed that are higher
than 100 Hz. This is typically only a
problem with analogue tape decks
(caused by the magnetic tape sticking
and slipping on component s in its path)
and is not often used when classifying
turntable performance.
Measurement and Weighting
The easiest accurate method to
measure the stability of the turntable’s
speed within the range of Wow and
Flutter is to follow one of the standard
methods (of which there are many, but
they are all similar
3
). A special
measurement disc containing a sine
tone, usually with a frequency of 3,150
Hz is played to a measurement device
which then does a frequency analysis
of the signal. In a perfect system, the
result would be a 3,150 Hz sine tone.
In practice, however, the frequency of
the tone varies over time, and it is this
variation that is measured and
analysed.
There is general agreement that we
are particularly sensitive to a
modulation in frequency of about 4 Hz
(4 cycles per second) applied to many
audio signals. As the modulation gets
slower or faster, we are less sensitive
to it, as was illustrated in the example
above: (a 1% change 4 times a second
is much easier to hear than a 1%
change lasting 1 hour).
So, for example, if the analysis of the
3,150 Hz tone shows that it varies by
±1% at a frequency of 4 Hz, then this
will have a bigger impact on the result
than if it varies by ±1% at a frequency
of 0.1 Hz or 40 Hz. The amount of
impact the measurement at any given
modulation frequency has on the total
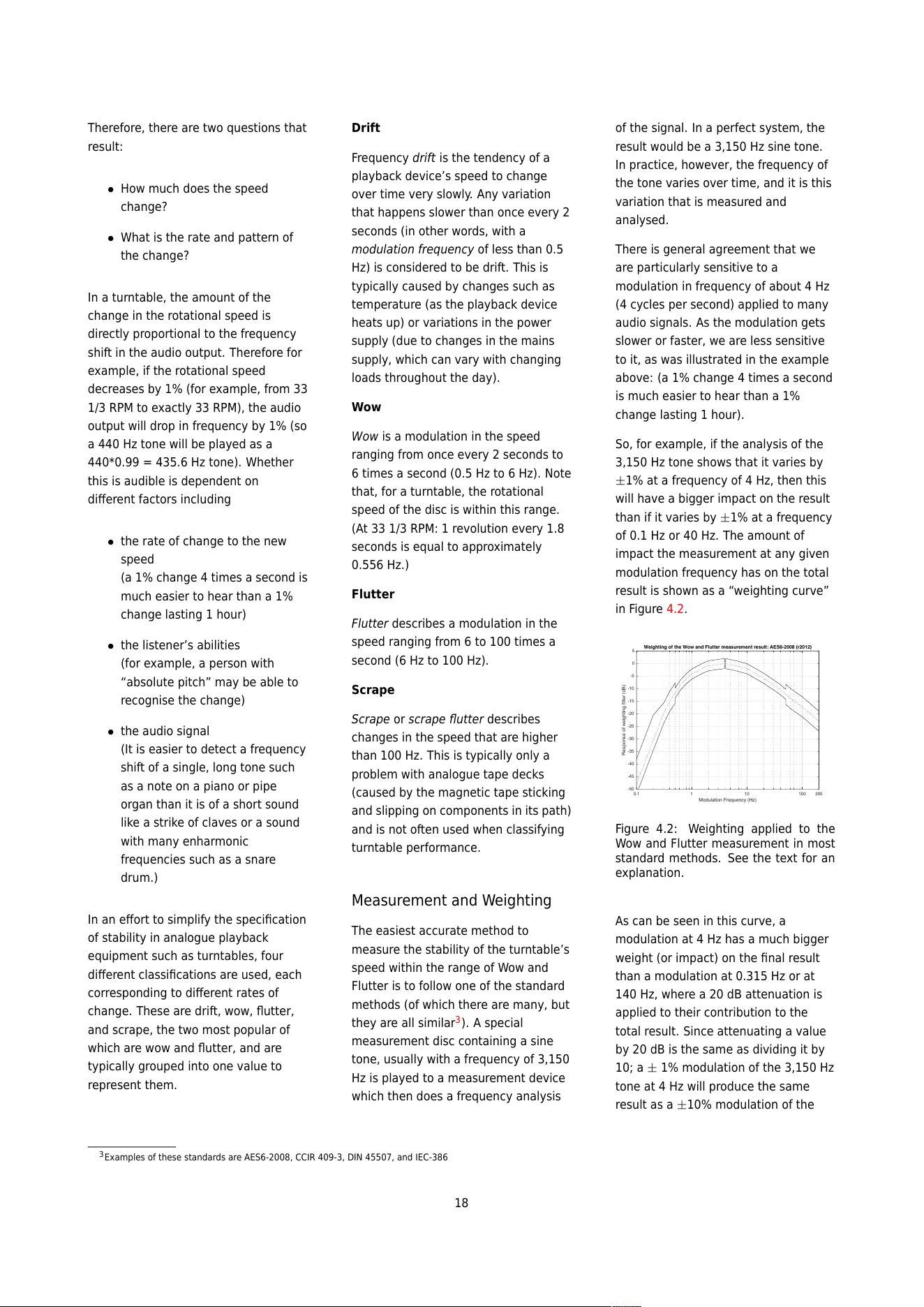
result is shown as a “weighting curve”
in Figure 4.2.
0.1 1 10 100 200
Modulation Frequency (Hz)
-50
-45
-40
-35
-30
-25
-20
-15
-10
-5
0
5
Response of weighting filter (dB)
Weighting of the Wow and Flutter measurement result: AES6-2008 (r2012)
Figure 4.2: Weighting applied to the
Wow and Flutter measurement in most
standard methods. Se e the text for an
explanation.
As can be seen in this curve, a
modulation at 4 Hz has a much bigger
weight (or impact) on the final result
than a modulation at 0.315 Hz or at
140 Hz, where a 20 dB attenuation is
applied to their contribution to the
total result. Since atten uat ing a value
by 20 dB is the same as dividing it by
10; a ± 1% modulation of the 3,150 Hz
tone at 4 Hz will produce the same
result as a ±10% modulation of the
3
Examples of these standards are AES6-2008, CCIR 409-3, DIN 45507, and IEC-386
18
3,150 Hz tone at 140 Hz, for example.
This shows just one example of why
comparing one Wow and Flutter
measurement value should be
interpreted very cautiously...
Expressing the result
When looking at a Wow and Flutter
specification, one will see something
like <0.1%, <0.05% (DIN), or <0.1%
(AES6). Like any audio specification, if
the details of the measurement type
are not included, then the value is
useless. For example, “W& F: <0. 1% ”
means nothing, since there is no way
to know which method was used to
arrive at this value.
4
If the standard is included in the
specification (DIN or AES6, for
example), then it is still difficult to
compare wow and flutter values. This
is because, even when performing
identical measurements and applying
the same weighting curve shown in
Figure 4.2, there are different methods
for arriving at the final value. The value
that you see may be a peak value (the
maximum deviation from the average
speed), the peak-to-peak value (the
difference between the minimum and
the maximum speeds), the RMS (a
version of the average deviation from
the average speed), or something else.
The AES6-2008 standard, which is the
currently accepted method of
measuring and expressing the wow
and flutter spe cifi c atio n, uses a “2σ” or
“2-Sigma” method, which is a way of
looking at the peak deviation to give a
kind of “worst-case” scenario. In this
method, the 3,150 Hz tone is played
from a disc and captured for as long a
time as is possible or feasible. Firstly,
the average value of the actual
frequency of the output is found (in
theory, it’s fixed at 3,150 H z, but this is
never true). Next, the short-term
variation of the actual frequency over
time is compared to the average, and
weighted using the filter shown in
Figure 4.2. The result shows the
instantaneous frequency variations
over the length of the captured signal,
relative to the average frequency
(however, the effect of very slow and
very fast changes have been reduced
by the filter). Finally, the standard
deviation of the variation from the
average is calculated, and multiplied
by 2 (hence “2-Sigma”, or “two times
the standard deviation”), resulting in
the value that is shown as the
specification. The reason two standard
deviations is chosen is that (in the
typical case where the deviation has a
Gaussian distribution) the actual Wow
& Flutter value should exceed this
value no more than 5% of the time.
The reason this method is preferred
today is that it uses a single number to
express not only the wow and flutter,
but the probability of the device
reaching that value. For example, if a
device is stated to have a Wow and
Flutter of “1% (AES6)”, then the actual
deviation from the average speed will
be less than 1% for 95% of the time
you are listening to music. The
principal reason this method was not
used in the 1970s when the Beogram
4002 turntable was released is that it
requires statistical calculations applied
to a signal that was captured from the
output of the turntable, an option that
was not available 45 years ago. The
older DIN method that was used
showed a long-term average level that
was being measured in real-time using
analogue equipment such as the
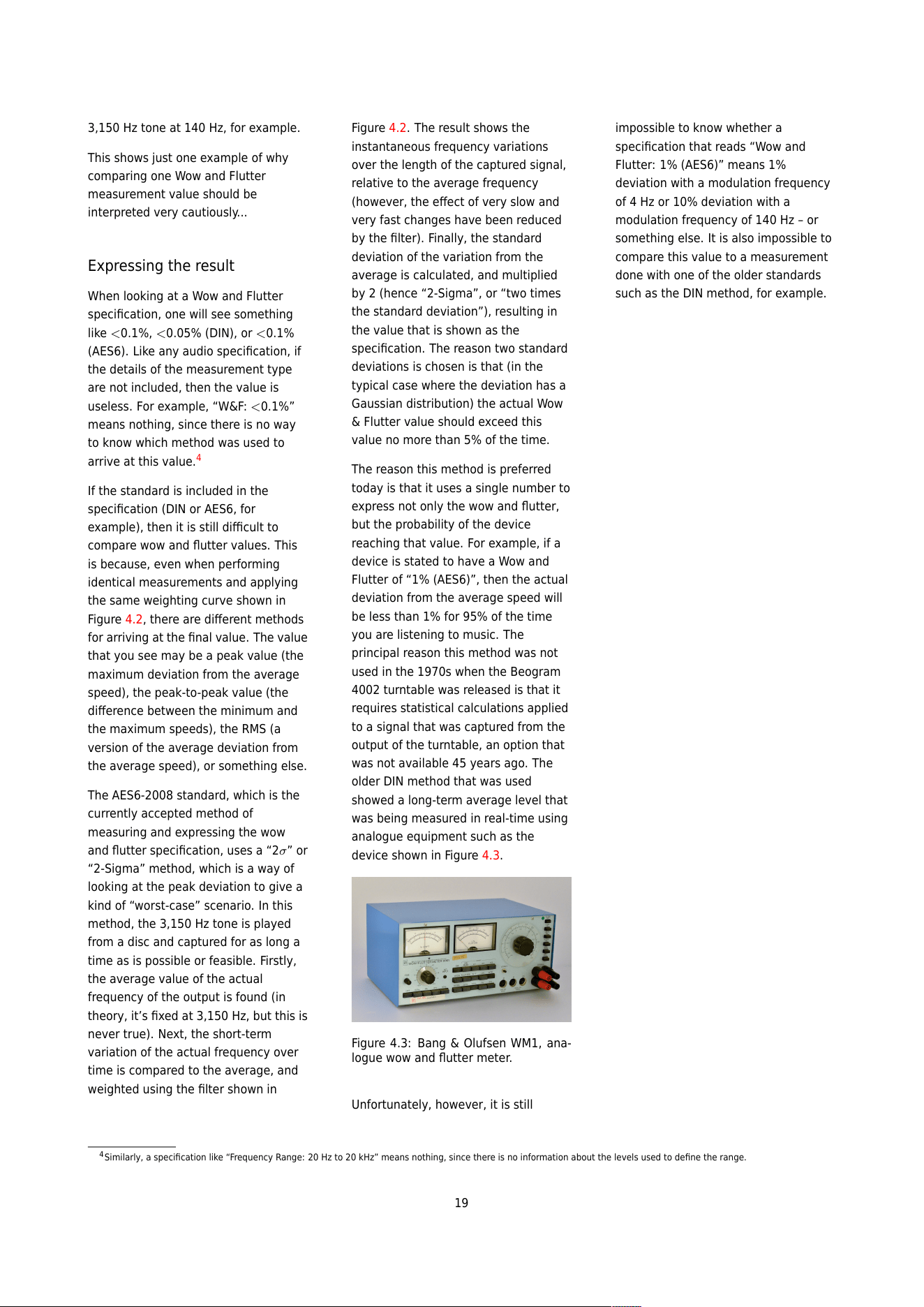
device shown in Figure 4.3.
Figure 4.3: Bang & Olufsen WM1, ana-
logue wow and flutter meter.
Unfortunately, however, it is still
impossible to know whether a
specification that reads “Wow and
Flutter: 1% (AES6)” means 1%
deviation with a modulation frequency
of 4 Hz or 10% deviation with a
modulation frequency of 140 Hz – or
something else. It is also impossible to
compare this value to a measurement
done with one of the older standards
such as the DIN method, for example.
4
Similarly, a specification like “Frequency Range: 20 Hz t o 20 k H z” means nothing, since there is no information abou t t he levels used to define the range.
19
Reading the measurement
datasheet
Each Beogram 4000c includes a
datasheet detailing the results of the
measurements of the turntable
including the installed Soundsmith
cartridge. These measurements were
done to verify that the performance of
each turntable was within the required
specifications, however, they can also
be used to help adjust parameters in
the playback system to improve the
overall experience.
FINAL VERIFICATION
Te st En g i ne e r
DateSignature
BEOGRAM 4000C
Serial Number
Te st Pl a c e
Measurements from Vinyl
Including the supplied Soundsmith SMMC20L cartridge
Magnitude Respon se
40 Hz - 10 kHz dB
Channel Matching
40 Hz - 10 kHz dB
Crosstalk
1 kHz dB
Rumble
DIN 45 539, Weighted dB
Wow and Flutter
AES6-2008 %
Frequency Drift
IEC 386 %
RIAA Preamplifier
Magnitude Respon se Deviati on
20 Hz - 20 kHz dB
Channel Matching
20 Hz - 20 kHz dB
Figure 5.1: The final verification s h ee t
that is included with each Beogram
4000c.
The following are some explanations of
how these measurements are
performed, using some examples
taken from actual products.
5.1 Measurements from Vinyl
In order to test the entire system,
including the motor and motor control,
the belt, bearings, pickup cartridge,
RIAA preamplifier, and all other
components in the signal path, various
signals are played from different disks
and the resulting outputs are analysed
differently.
5.1.1 Magnitude Response
The magnitude response of the total
system is measured using a standard
test disc that contains a track with a
sinusoidal wave. The frequency of that
tone is swept from a low frequency to a
high frequency, typically using a
logarithmic scaling. This means that it
changes by the same number of
octaves per second (instead of the
same number of Hertz per second).
In the case of the measurements
supplied with the Beogram 4000c, the
test disk we use is the JCV TRS-1007,
which contains a 20 Hz - 20,000 Hz
logarithmic sweep that lasts 50
seconds (5 seconds per octave), first
played on the left channel, then on the
right channel.
One important thing to note is that the
sinusoidal tone on the LP has a
nominal level of 35.4 mm/sec
modulation velocity. At 1 kHz, the level
is 1 dB below this: at 31.7 mm/sec.
Below 1 kHz, the signal has a level that
follows the RIAA standa rd. However,
above 4 kHz the signal on the disk has
a constant velocity without the RIAA
emphasis applied. This is because if a
mastering lathe is pushed to cut a
groove at high levels in the very high
frequency bands, the power required
will burn out the coils in the cutter
head.
Consequently, if the sinusoidal sweep
is played through a standard RIAA
preamplifier, the result will be a
magnitude response that appears to be
flat below about 1 kHz, but follows the
RIAA de-emphas is cu rve ab ove 4 kH z.
10
2
10
3
10
4
Frequency (Hz)
-20
-15
-10
-5
0
5
10
Response (dB)
Magnitude Response from Vinyl (dB)
Figure 5.2: Raw results from the Mag-
nitude Response measurement. This is
processed to generate the result in Fig-
ures 5.3, for example.
The two tracks from the JVC disk are
played and captured by a
measurement system. The resulting
recordings are analysed to find the
level output over the 50 seconds of the
sweep signal. An example of the “raw”
resulting measured outputs from a
total system are shown in Figure 5.2.
Since it’s difficult to interpret the
actual magnitude response of the
system from this recording, the
expected response (flat below 1 kHz
and following the RIAA response above
4 kHz) is subtracted from the
measurements, resulting in the
magnitude response plot shown in
Figure 5.3.
10
2
10
3
10
4
Frequency (Hz)
-5
-4
-3
-2
-1
0
1
2
3
4
5
Response (dB)
Magnitude Response from Vinyl rel. expected (dB)
Figure 5.3 : Results from a magnitude re-
sponse measurement. The result of this
measurement was ± 1.4 dB.
Note that these curves have been
normalised to a nominal level of 0 dB
at 1 kHz. This is because this
measurement is only for the
magnitude response of each channel.
For each channel, the total
20
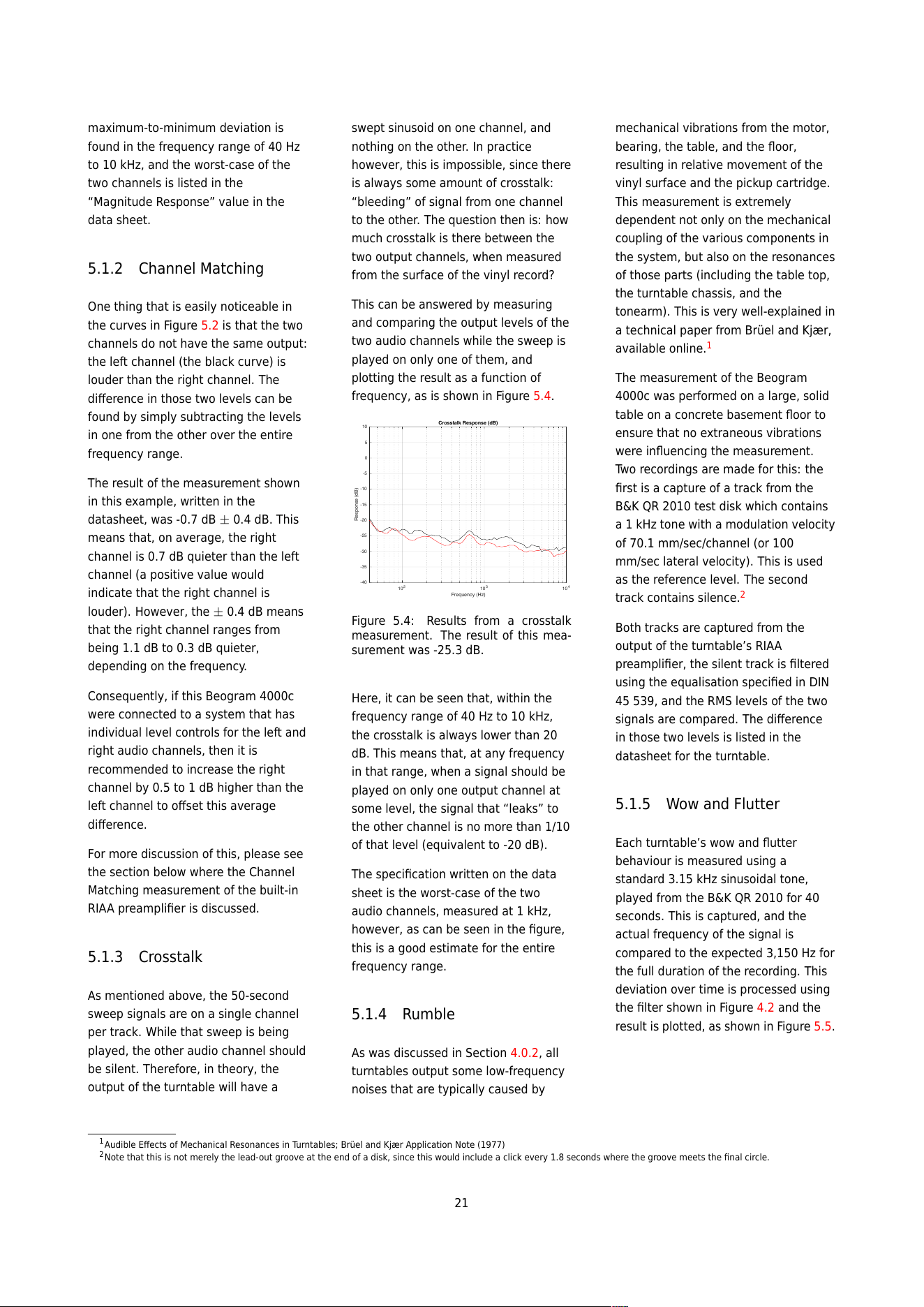
maximum-to-minimum deviation is
found in the frequency range of 40 Hz
to 10 kHz, and the worst-case of the
two channels is listed in the
“Magnitude Response” value in the
data sheet.
5.1.2 Channel Matching
One thing that is easily noticeable in
the curves in Figure 5.2 is that the two
channels do not have the same output:
the left channel (the black curve) is
louder than the right channel. The
difference in those two levels can be
found by simply subtracting the levels
in one from the other over the entire
frequency range.
The result of the measurement shown
in this example, written in the
datasheet, was -0.7 dB ± 0.4 dB. This
means that, on average, the right
channel is 0.7 dB quieter than the left
channel (a positive value would
indicate that the right channel is
louder). However, the ± 0.4 dB means
that the right channel ranges from
being 1.1 dB to 0.3 dB quieter,
depending on the frequency.
Consequently, if this Beogram 4000c
were connected to a system that has
individual level controls for the left and
right audio channels, then it is
recommended to increase the right
channel by 0.5 to 1 dB higher than the
left channel to offset this average
difference.
For more discussion of this, please see
the section below where the Channel
Matching measurement of the built-in
RIAA preamplifier is discussed.
5.1.3 Crosstalk
As mentioned above, the 50-second
sweep signals are on a single channel
per track. While that sweep is being
played, the other audio channel should
be silent. Therefore, in theory, the
output of the turntable will have a
swept sinusoid on one channel, and
nothing on the other. In practice
however, this is impossible, since there
is always some amount of crosstalk:
“bleeding” of signal from one channel
to the other. The question then is: how
much crosstalk is there between the
two output channels, when measured
from the surface of the vinyl record?
This can be answered by measuring
and comparing the output levels of the
two audio channels while the sweep is
played on only one of them, and
plotting the result as a function of
frequency, as is shown in Figure 5.4.
10
2
10
3
10
4
Frequency (Hz)
-40
-35
-30
-25
-20
-15
-10
-5
0
5
10
Response (dB)
Crosstalk Response (dB)
Figure 5.4: Res ults from a crosst alk
measurement. The result of this mea-
surement was -25.3 dB.
Here, it can be seen that, within the
frequency range of 40 Hz to 10 kHz,
the crosstalk is always lower than 20
dB. This means that, at any frequency
in that range, when a signal should be
played on only one output channel at
some level, the signal that “leaks” to
the other channel is no more than 1/10
of that level (equivalent to -20 dB).
The specification written on the data
sheet is the worst-case of the two
audio channels, measured at 1 kHz,
however, as can be seen in the figure,
this is a good estimate for the entire
frequency range.
5.1.4 Rumble
As was discussed in Section 4.0.2, all
turntables output some low-frequency
noises that are typically caused by
mechanical vibrations from the motor,
bearing, the table, and the floor,
resulting in relative movement of the
vinyl surface and the pickup cartridge.
This measurement is extremely
dependent not only on the mechanical
coupling of the various components in
the system, but also on the resonances
of those parts (including the table top,
the turntable chassis, and the
tonearm). This is very well-explained in
a technical paper from Brüel and Kjær,
available online.
1
The measurement of the Beogram
4000c was performed on a large, solid
table on a concrete basement floor to
ensure that no extraneous vibrations
were influencing the measurement.
Two recordings are made for this: the
first is a capture of a track from the
B&K QR 2010 test disk which contains
a 1 kHz tone with a modulation velocity
of 70.1 mm/sec/channel (or 100
mm/sec lateral velocity). This is used
as the reference level. The second
track contains silence.
2
Both tracks are captured from the
output of the turntable’s RIAA
preamplifier, the silent track is filtered
using the equalisation specified in DIN
45 539, and the RMS levels of the two
signals are compared. The difference
in those two levels is listed in the
datasheet for the turntable.
5.1.5 Wow and Flutter
Each turntable’s wow and flutter
behaviour is measured using a
standard 3.15 kHz sinusoidal tone,
played from the B&K QR 2010 for 40
seconds. This is captured, and the
actual frequency of the signal is
compared to the expected 3,150 Hz for
the full duration of the recording. This
deviation over time is processed using
the filter shown in Figure 4.2 and the
result is plotted, as shown in Figure 5 .5 .
1
Audible Effects of Mechanical Resonances in Turntables; Brüel and Kjær Application Note (1977)
2
Note that this is not merely the lead-out groove at the end of a disk, since this would include a click every 1.8 seconds where the groove meets the final circle.
21
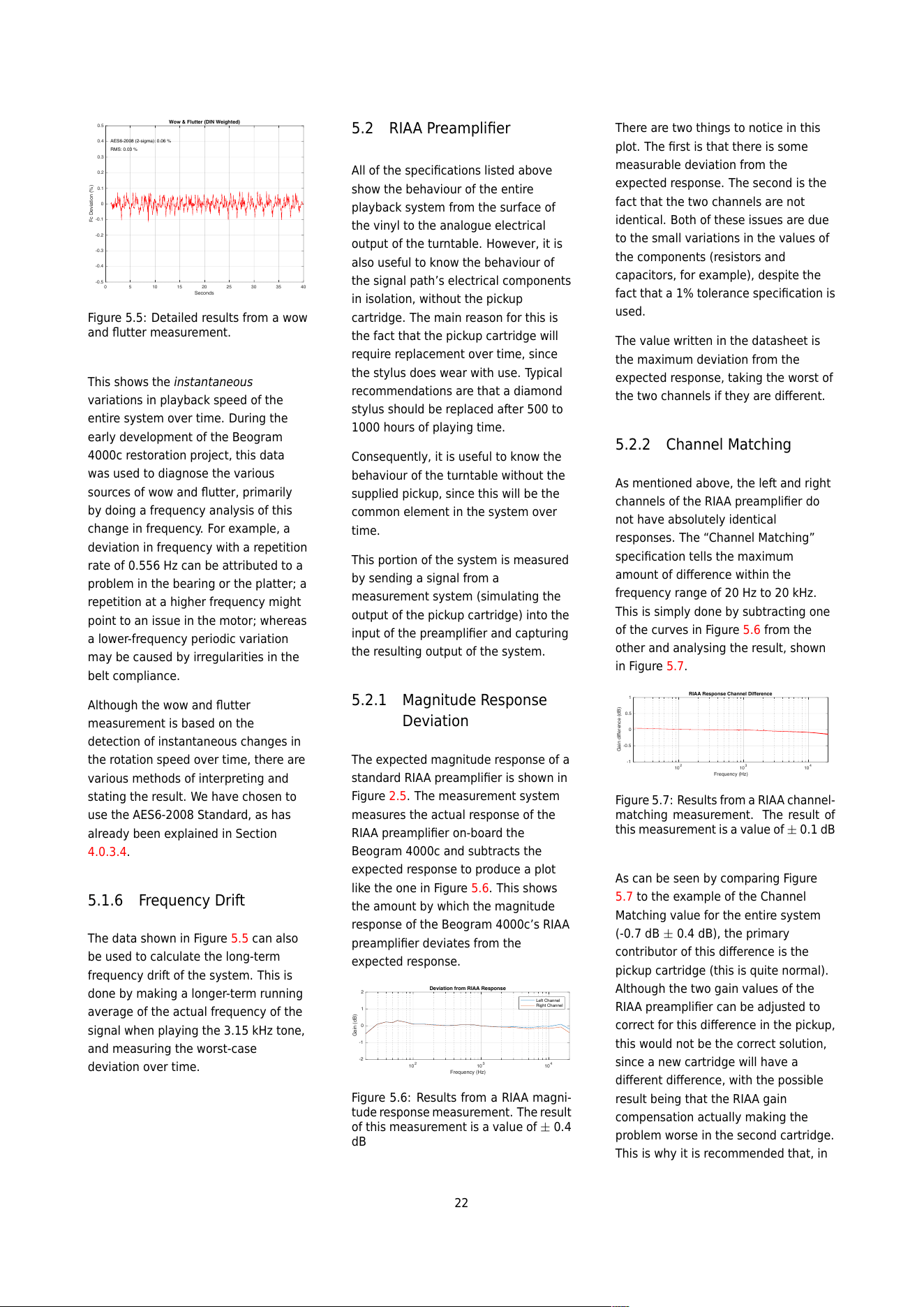
0 5 10 15 20 25 30 35 40
Seconds
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Fc Deviation (%)
Wow & Flutter (DIN Weighted)
AES6-2008 (2-sigma): 0.06 %
RMS: 0.03 %
Figure 5.5: Detailed results from a wow
and flutter measurement.
This shows the instantaneous
variations in playback speed of the
entire system over time. During the
early development of the Beogram
4000c restoration project, this data
was used to diagnose the various
sources of wow and flutter, primarily
by doing a frequency analysis of this
change in frequency. For example, a
deviation in frequency with a repetition
rate of 0.556 Hz can be attributed to a
problem in the bearing or the platter; a
repetition at a higher frequency might
point to an issue in the motor; whereas
a lower-frequency periodic variation
may be caused by irregularities in the
belt compliance.
Although the wow and flutter
measurement is based on the
detection of instantaneous changes in
the rotation speed over time, there are
various methods of interpreting and
stating the result. We have chosen to
use the AES6-2008 Standard, as has
already been explained in Section
4.0.3.4.
5.1.6 Frequency Drift
The data shown in Figure 5.5 can also
be used to calculate the long-term
frequency drift of the system. This is
done by making a longer-term running
average of the actual frequency of the
signal when playing the 3.15 kHz tone,
and measuring the worst-case
deviation over time.
5.2 RIAA Preamplifier
All of the specifications listed above
show the behaviour of the entire
playback system from the surface of
the vinyl to the analogue electrical
output of the turntable. However, it is
also useful to know the behaviour of
the signal path’s electrical components
in isolation, without the pickup
cartridge. The main reason for this is
the fact that the pickup cartridge will
require replacement over time, since
the stylus does wear with use. Typical
recommendations are that a diamond
stylus should be replaced after 500 to
1000 hours of playing time.
Consequently, it is useful to know the
behaviour of the turntable without the
supplied pickup, since this will be the
common element in the system over
time.
This portion of the system is measured
by sending a signal from a
measurement system (simulating the
output of the pickup cartridge) into the
input of the preamplifier and capturing
the resulting output of the system.
5.2.1 Magnitude Response
Deviation
The expected magnitude response of a
standard RIAA preamplifier is shown in
Figure 2.5. The measurement system
measures the actual response of the
RIAA preamplifier on-board th e
Beogram 4000c and subtracts the
expected response to produce a plot
like the one in Figure 5.6. This shows
the amount by which the magnitude
response of the Beogram 4000c’s RIAA
preamplifier deviates from the
expected response.
10
2
10
3
10
4
Frequency (Hz)
-2
-1
0
1
2
Gain (dB)
Deviation from RIAA Response
Left Channel
Right Channel
Figure 5.6: Results from a RIAA magni-
tude response measurement. The result
of this measurement is a value of ± 0.4
dB
There are two things to notice in this
plot. The first is that there is some
measurable deviation from the
expected response. The second is the
fact that the two channels are not
identical. Both of these issues are due
to the small variations in the values of
the components (resistors and
capacitors, for example), despite the
fact that a 1% tolerance specification is
used.
The value written in the datasheet is
the maximum deviation from the
expected response, taking the worst of
the two channels if they are different.
5.2.2 Channel Matching
As mentioned above, the left and right
channels of the RIAA preamplifier do
not have absolutely identical
responses. The “Channel Matching”
specification tells the maximum
amount of difference within the
frequency range of 20 Hz to 20 kHz.
This is simply done by subtracting one
of the curves in Figure 5.6 from the
other and analysing the result, shown
in Figure 5.7.
10
2
10
3
10
4
Frequency (Hz)
-1
-0.5
0
0.5
1
Gain difference (dB)
RIAA Response Channel Difference
Figure 5.7: Results from a RIAA channe l-
matching measurement. The result of
this measurement is a value of ± 0.1 dB
As can be seen by comparing Figure
5.7 to the example of the Channel
Matching value for the entire system
(-0.7 dB ± 0.4 dB), the primary
contributor of this difference is the
pickup cartridge (this is quite normal).
Although the two gain values of the
RIAA preamplifier can be adjusted to
correct for this difference in the pickup,
this would not be the correct solution,
since a new cartridge will have a
different difference, with the possible
result being that the RIAA gain
compensation actually making the
problem worse in the second cartridge.
This is why it is recommended that, in
22

cases where you wish to correct for the
gain offset, this should be done as a
“temporary” measure in the playback
system.
Attentive readers may notice some
small spikes in the plot in Figure 5.7.
These are merely artefacts of the
measurement system, revealed by the
subtraction of the two curves. They are
not reflective of actual differences in
the preamplifier’s responses.
23
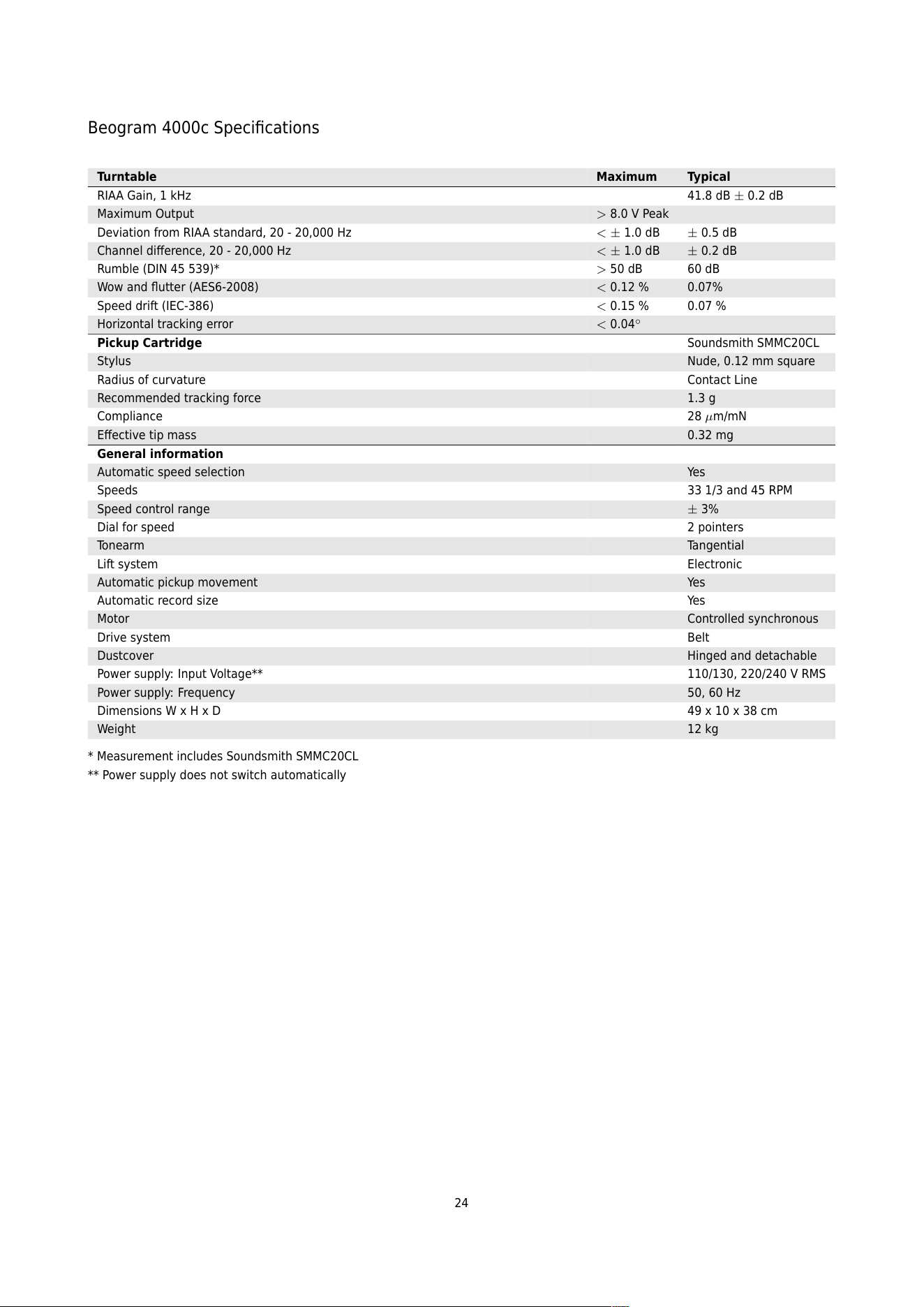
Beogram 4000c Specifications
Turntable Maximum Typical
RIAA Gain, 1 kHz 41.8 dB ± 0.2 dB
Maximum Output > 8.0 V Peak
Deviation from RIAA standard, 20 - 20,000 Hz < ± 1.0 dB ± 0.5 dB
Channel difference, 20 - 20,000 Hz < ± 1.0 dB ± 0.2 dB
Rumble (DIN 45 539)* > 50 dB 60 dB
Wow and flutter (AES6-2008) < 0.12 % 0.07%
Speed drift (IEC-386) < 0.15 % 0.07 %
Horizontal tracking error < 0.04
◦
Pickup Cartridge Soundsmith SMMC20CL
Stylus Nude, 0.12 mm square
Radius of curvature Contact Line
Recommended tracking force 1.3 g
Compliance 28 µm/mN
Effective tip mass 0.32 mg
General infor ma tio n
Automatic speed selection Yes
Speeds 33 1/3 and 45 RPM
Speed control range ± 3%
Dial for speed 2 pointers
Tonearm Tangential
Lift system Electronic
Automatic pickup movement Yes
Automatic record size Yes
Motor Controlled synchronous
Drive system Belt
Dustcover Hinged and detachable
Power supply: Input Voltage** 110/130, 220/240 V RMS
Power supply: Frequency 50, 60 Hz
Dimensions W x H x D 49 x 10 x 38 cm
Weight 12 kg
* Measurement includes Soundsmith SMMC20CL
** Power supply does not switch automatically
24
Further Reading
Audible Effects of Mechanical Resonances in Turntables; Brüel and Kjær Application Note (1977)
Audio Measurement Handbook; Bob Metzler, Audio Precision Inc. (1993)
Basic Disc Mastering; Larry Boden (1981)
Cartridge / Arm / Turntable Followup: Loose Ends and New Deve lopm en ts , The Aud io Critic , 1:43 (Spr ing/Fall, 1978)
Handbook for Sound Engineers: The New Audio Cyclopedia; ed. Glen Ballou (1987)
Have Tone Arm Designers Forgotten Their High-School Geometry?; The Audio Critic, 1:31 (Jan./Feb. 1977).
How the Stereo Disc Works; Radio-Electronics, (July 1958)
Manual of Analogue Sound Restoration Techniques; Peter Cop ela nd (2008 )
On the Mechanics of Tonearms; Dick Pierce (2005)
Pickup Arm Design; J.K. Stevenson, Wireless Wo rld (May /June , 196 6)
Reproduction of Sound in High-Fidelity and Stereo Phonographs; Edgar Villchur (1966)
Tracking Angle in Phonograph Pickups ; B.B. Bau er , Ele ct ronics (March 1945)
Journal of the Audio Engineering Society (www.aes.org)
• Centennial Issue: The Phonograph and Sound Recording After One-Hundred Years; Vol. 25, No. 10/11 (Oct./Nov. 1977)
• Factors Affecting the Stylus / Groove Relationship in Phonograph Playback Systems; C.R. Bastiaans; Vol. 15 Issue 4 (Oct. 1967)
• Further Thoughts on Geometric Condit ions in the Cut tin g and Playing of Stereo Disk; C.R. Bastiaans; Vol. 11 Issue 1 (Jan. 1963)
• Record Changers, Turntables, and Tone Arms-A Brief Technical History, James H. Kogen; Vol. 25 (Oct./Nov. 1977)
• Some Thoughts on Geometric Conditions in the Cutting and Playing of Stereodiscs and Their Influence on the Final Sound Picture;
Ooms, Johan L., Bastiaans, C. R.; Vol. 7 Issue 3 (Jul. 1959)
• The High-Fidelity Phonograph Transducer, B.B. Bauer; Vol. 25 Issue 10/11 (Nov. 1977)
DIN Standards
• 45 500: Hi-Fi Technics: Requirements for Disk Recording Reproducing Equipment
• 45 507: Measuring Apparatus for Frequency Variations in Sound Recording Equipment
• 45 538: Definitions for Disk Record Reproducing Equipment
• 45 539: Disk Re c ord Reproducing Equipment: Directives for Measurements, M ar k ings , and Audio Frequency, Connections,
Dimensions of Interchangeable Pickups, Requirements of Playback Amplifier s
• 45 541: Frequency Test Re co rd St 33 and M 33 (33 1/3 rev/min; Stereo and Mono)
• 45 542: Distortion Test Record St 33 and St 45 (33 1/3 or 45 rev/min; Stereo)
• 45 543: Frequency Response and Crosstalk Test Record
• 45 544: Rumble Me as urement Test Record St 33 and M 33 (33 1/3 rev/min; Stereo and Mono)
• 45 545: Wow and Flutter Test Records, 33 1/3 and 45 rev/min
• 45 546: Stereophonic Disk Record St 45 (45 rpm)
• 45 547: Stereophonic Disk Record St 33 (33 1/3 rpm)
• 45 548 Aptitude for Performance o f Dis k Record Reproducing Equipment
• 45 549: Tracking Ability Test Record
25
IEC Publications
• 98: Reco mm en dat ions fo r La te ra l-C ut Com me rcial and Transcription Disk Record ings
• 98: Processed Disk Records and Reproducing Equipment
• 386: Method of Measurement of Speed Fluctuations in Sound Recording and Reproducing Equipment
26






