Loading ...
Loading ...
Loading ...
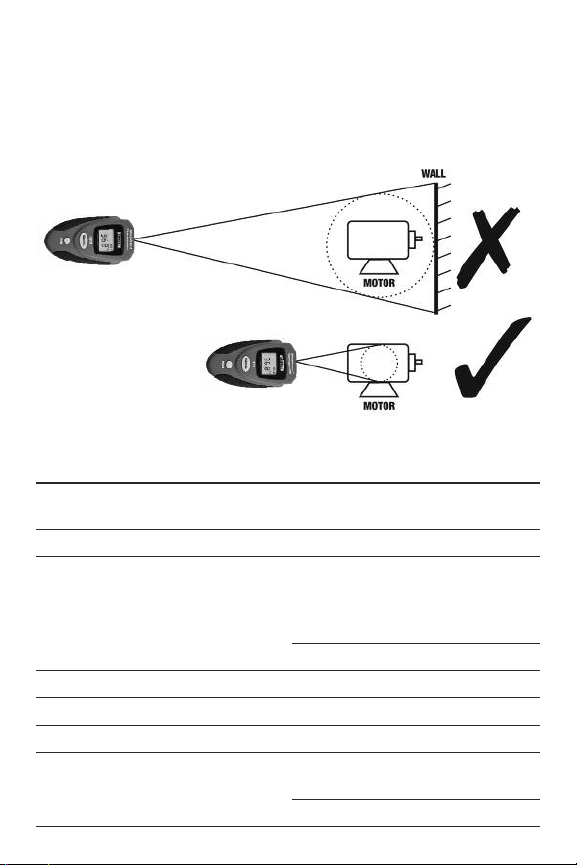
For example, when using the IRT3 to measure the
temperature of a motor with an area of 1 ft
2
, the optimal
measurement distance would be 4 ft. To eliminate error, the
IRT must be moved close enough so the motor is the only
object in the target area (see Fig. 4 below).
Fig. 4. Measuring a motor’s temperature from the wrong
(top) and right (bottom) distance.
SPECIFICATIONS
Measurement Range/Resolution -22° to 482°F (-30° to 250°C)/0.1°
Measurement Accuracy ±3.6°F (2°C) or 2% of reading
(whichever is greater) above 32°F
(0°C); ±5.4°F (3°C) or 2% of reading
(whichever is greater) below 32°F
Measurement Repeatability 1% of reading or 1°C
Distance-To-Spot (D:S) Ratio 4:1
Emissivity Fixed at 0.95
Response Time 500 msec for 95% response
Display Type/Size LCD/1.0 (H) x 0.7 (W) in.
(25 x 18mm)
Laser Class/Power/Wavelength Class 2/<1mW/655nm
6
Loading ...
Loading ...
Loading ...