Loading ...
Loading ...
Loading ...
22
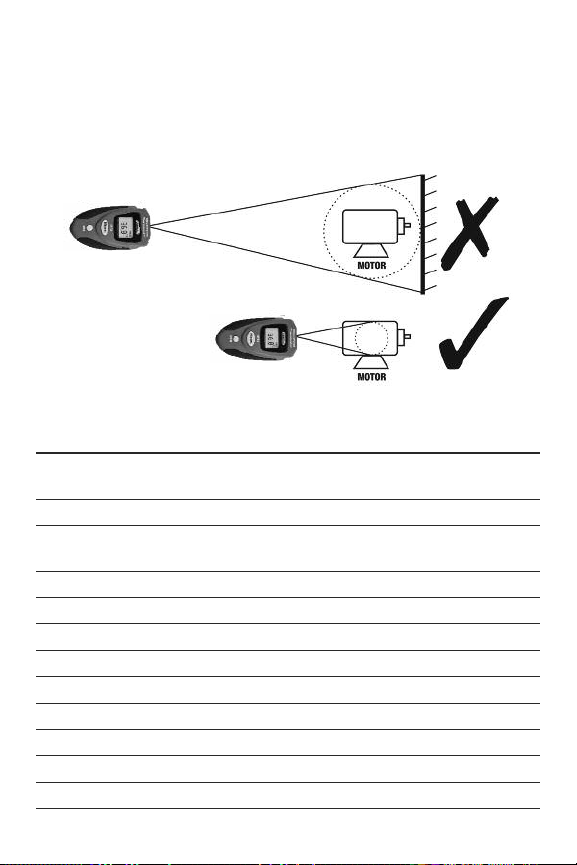
Por ejemplo, al usar el IRT3 para medir la temperatura de un
motor con un área de 1 m
2
, la distancia óptima de medición
sería de 2,5 cm. Para eliminar errores, hay que mover el
termómetro lo suficientemente cerca como para que el motor
sea el único objeto dentro del área del objetivo (ver la Fig. 4 a
continuación).
Fig. 4. Medición de temperatura de un motor desde la
distancia incorrecta (arriba) y correcta (abajo).
ESPECIFICACIONES
Rango/resolución de la medición: -30 a 250 °C /0,1°
Precisión de la medición: ±2 °C o 2% de la lectura (lo que sea mayor) sobre
0 °C ; ±3 °C o 2% de la lectura (lo que sea mayor) debajo de 0 °C
Repetibilidad de la medición: 1% de la lectura o 1 °C
Relación distancia-blanco (D:S): 4:1
Emisividad: Fija a 0,95
Tiempo de respuesta: 500 mseg para un 95% de respuesta
Tipo/tamaño de pantalla: LCD/25 mm (Al) x 18 mm (An)
Clase/potencia/longitud de onda del láser: Clase 2 < 1 mW/655 nm
Longitud de onda de respuesta: 8 a 14 µm
Apagado automático: Después de 15 segundos de inactividad
Vida de la batería del termómetro: 50 horas, típica
PARED
Loading ...
Loading ...