Loading ...
Loading ...
Loading ...
257
4-5. Using the driving support systems
4
Driving
AVALON_U
● Instances of the BSM function unnecessarily detecting a vehicle and/or
object may increase under the following conditions:
• When the sensor is misaligned due to a strong impact to the sensor or its
surrounding area
• When there is only a short distance between your vehicle and a guardrail,
wall, etc.
• When there is only a short distance between your vehicle and a following
vehicle
• When vehicle lanes are narrow and a vehicle driving 2 lanes across from
your vehicle enters the detection area
• When driving on roads with sharp bends, consecutive curves, or uneven
surfaces
• When items such as a bicycle carrier are installed on the rear of the vehi-
cle
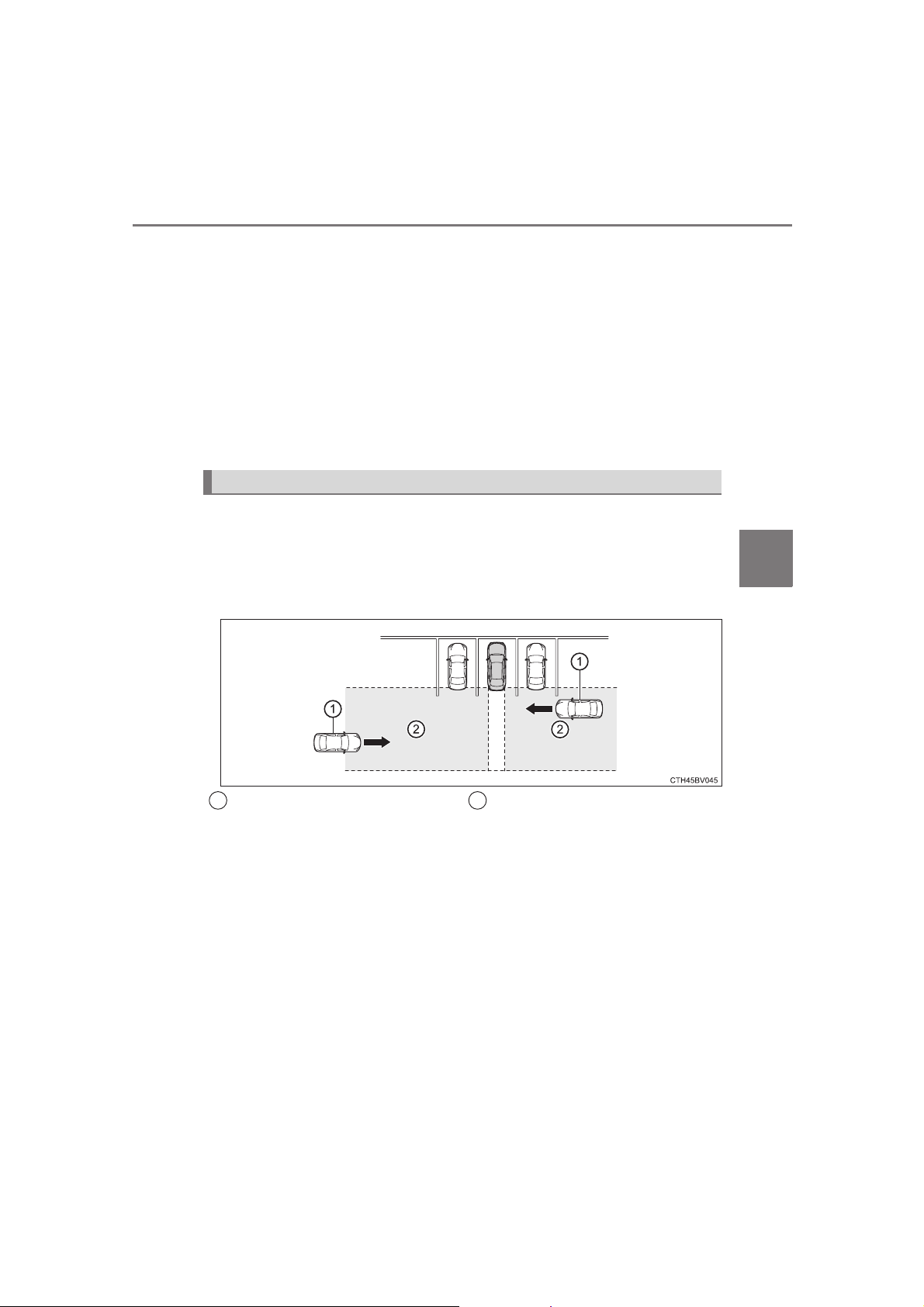
The RCTA functions when your vehicle is in reverse. It can detect
other vehicles approaching from the right or left rear of the vehicle. It
uses radar sensors to alert the driver of the other vehicle’s existence
through flashing the outside rear view mirror indicators and sounding
a buzzer.
RCTA function
Approaching vehicles Detection areas
1 2
Loading ...
Loading ...
Loading ...