Loading ...
Loading ...
Loading ...
7-2-4 Ice-removing control function
1. Ice-removing control means operation to separate ice within ice-making tray ( ice-making container) after ice-making is
completed.
2. Step to check ices stored at the ice bank (container for storing ice) are fully filled. It is considered as they are fully tilled if
signals of the hall sensor are at the On status ("high") before 3.6seconds alter rotating positively the ice-making motor. In
this case, the ice-making motor remains at the waiting status without performing ice-removing function.
Perform ice-detecfing operation after rotating positively the ice-making motor in the cycle of an hour if the full ice status is
detected. Perform water supply control function after completing ice-ramoving function in the short of ices stored.
Reversely rotating the ice-removing motor in the storage of full ices and then let the motor stop at the position of the ice-
making or waiting status.
3. Ice-ramoving control performs ice-removing operation immediately if ices stored at the ice bank (container for storing ice)
are not fully tilled (the hall sensor are at the Off status ("low") within 3.6seconds after rotating positively the ice-making
motor). In this case, it positively rotates (CW) the ice-removing motor and keeps the ice-making tray at the maximum dis-
tortJonstatus and makes ices be separated from the ice-making tray. In this case, ice-detecting lever automatically oper-
ates lifting operation with ice-removing operation.
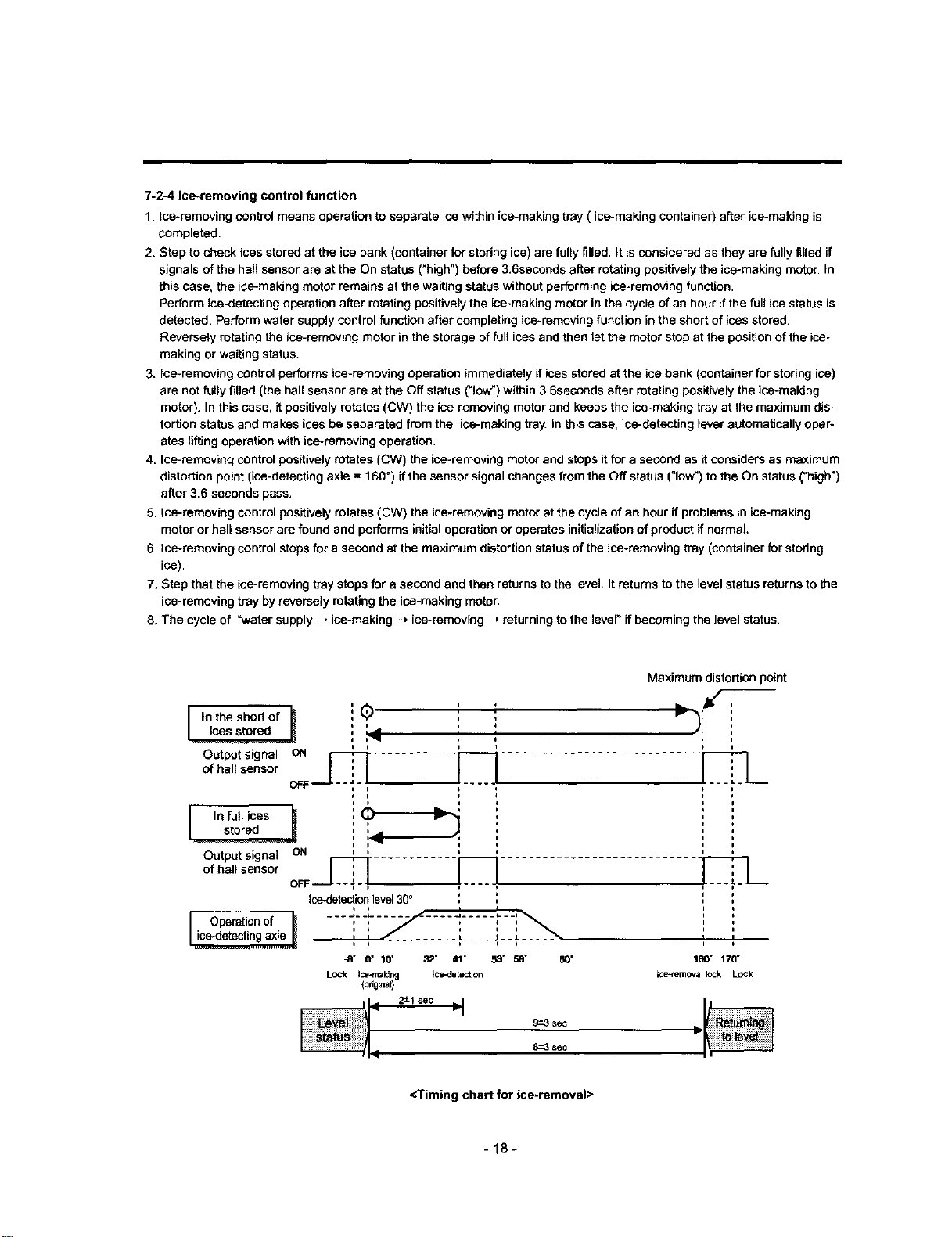
4. Ice-removing control positively rotates (CW) the ice-removing motor and stops it for a second as it considers as maximum
distortion point (ice-detecting axle = 160 °) if the sensor signal changes from the Off status ("low") to the On status ("high")
alter 3.6 seconds pass.
5. Ice-removing control positively rotates (CW) the ice-removing motc_ at the cycle of an hour if problems in ice-making
motor or hall sensor are found and performs initial operation or operates initialization of product if normal.
6. Ice-removing control stops for a second at the maximum distortion status of the ice-removing tray (container for storing
ice).
7. Step that the ice-removing tray stops for a second and then returns to the level. It returns to the level status returns to the
ice-removing tray by reversely rotating the ice-making motor.
8. Thecycleof "watarsupply *ice-making.*ice-ramoving _returningtothelevel"ifbecomingthelevelstatos.
Maximum distortion point
In the short of 111 , , ' ,;
i i"ql
i i i i i
Oatput signal :_ ............ _ ............................
of hall sensor
',
__. s_..__...___lnfull ices k ','_,
i
Output signal ON , ............ , ............................ ,
of hall sensor OFF_ ,_,
Ice-detectionlevel 30° , ',
i i i i
i * = i i i i
I i i i I
Operationof
.!ce-dstecfing axle_
_" e" 10" _" 41" 53" F:_* 80" 16o" 170"
Lock Ice-making tc_detect_n l_moval lock LoCk
(origloat)
2±1 _c _ I h
_1 9_ sac b
8_3sac
,:Timing chart for ice-removal>
-18-
Loading ...
Loading ...
Loading ...